Guideing oznacza automatyczne prowadzenie montażu za obiektem z wykorzystaniem kamery zamocowanej na montażu, najczęściej z własnym systemem optycznym. Zasada działania prowadzenia to układ nadążny (śledzący) działający w zamkniętej pętli sprzężenia zwrotnego. Sygnałem sterującym jest tu błąd położenia obiektu prowadzenia w stosunku do punktu odniesienia. Im większy jest błąd prowadzenia tym silniejszy jestbyć sygnał korekcyjny działający w kierunku zmniejszenia błędu. W rezultacie ukałd ma tenedencję do minimalizacji błędu prowadzenia czego wynikiem jest nadążanie montażu za obiektem
Warunki jakie należy spełnić aby wykonać guiding:
- montaż paralaktyczny z napędem co najmniej dla jednej osi lub montaż azymutalny z napędem na obie osie
- kamera rozpoznawalna przez system operacyjny (np. Vesta)
- program guider-a
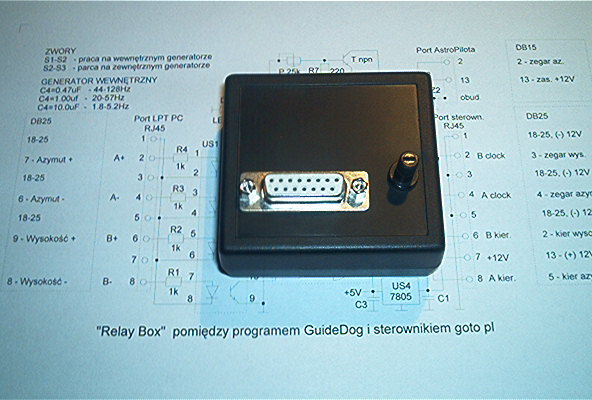
Dalszy opis zawiera informacje dotyczące systemu guide zbudowanego dla montażu azymutalnego (Synta 200/1200 z napędem na obie osie) działającego z programem GuideDog oraz z kamerą Vesta 640. Zasadnicza inowacja jaka została wprowadzona przeze mnie to 'RelyBox' łączący interface programu GuideDog ze sterownikiem silników krokowych napędu teleskopu Synta 200/1200. Program GuideDog uwzględnia warunki sterowania określone w zunifikowanej definicji układów sterowania w astronomii ASCOM. Wymaga więc od napędu teleskopu 'rozumienia' specyfiki sygnalizacji ASCOM. Opisany Układ 'RelyBox' pozwala na użycie z programem GuideDog dowolnego sterownika silników krokowych sterowanego sygnałem zegara oraz sygnałem kierunku.
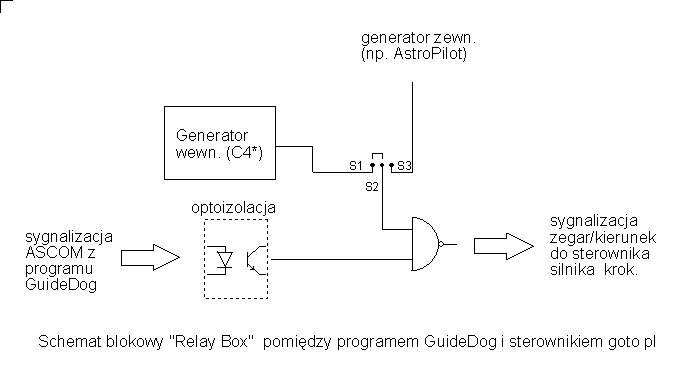
Na rysunku pokazany został schemat blokowy układu 'RelayBox'. Zawiera on separator optyczny portu LPT komputera PC, wewnętrzny generator impulsów zegarowych oraz logikę zamieniającą sygnalizację ASCOM na sygnalizację zrozumiałą dla sterownika z wejściami zegara i kierunku.
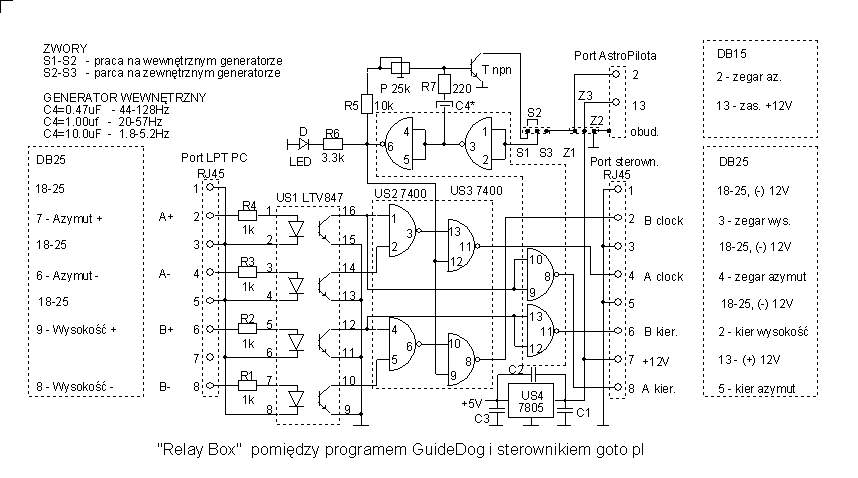
Schemat układu zawiera kilka prostych układów logicznych (poczwórny optoizolator, cztery podwójne bramki NAND) oraz kilka innych elementów dyskretnych. W szczególności ukłąd zawiera włąsny generator impulsów sterujących dla obu osi zbudowany na bramkach US3. O częstotliwości pracy tego generatora decyduje kondensator C4 oraz potencjometr P 25kom. Częstotliwość pracy generatora powinna umożliwiać sprawne nadążanie montażu za obiektem. Przyjmuje się, że powinna ona umożliwiać pracę silnika napędu w osi Ra z prędkością około 2 krotnie większą od prędkości śledzenia. Na schemacie znajdują się wyliczenia częstotliwości pracy generatora dla różnych pojemności C4 oraz dla różnych ustawień potencjometru P. Ponieważ jednak stabilność pracy tego generatora silnie zależy od wartości C4 może okazać się, że zmienia się znacząco z temperaturą otoczenia w stopniu istotnym dla sterowania. W związku z tym może okazać się celowe sterowanie z zewnętrznego stabilnego żródła impulsów. Taka możliwość istnieje w ukąłdzie dzięki systemowi zwor S. Jeśli zwarte są styki S1 i S2 wtedy działa wewnętrzny generator a jeśli styki S2 i S3 wtedy układ musi być sterowany impulsami z zewnątrz. W tym konkretnym rozwiązaniu możliwe jest użycie do sterowania AstroPilota dołączonego do systemu poprzez gniazdo DB15F dołączone do systemu styków Z1-Z3. AstroPilot jest programowalnym, stabilnym generatorem impulsów zapewniającym dopasowanie do warunków każdego montażu.
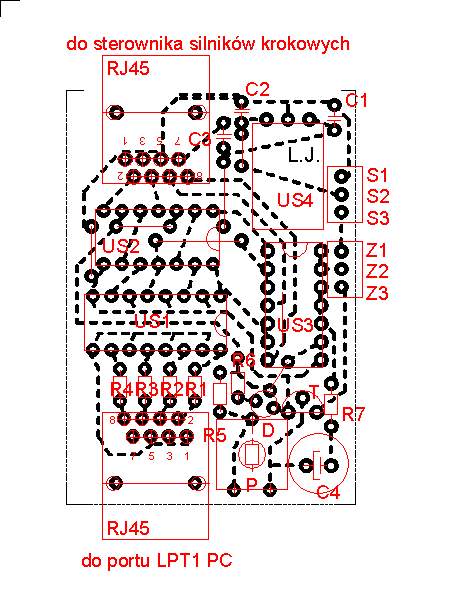
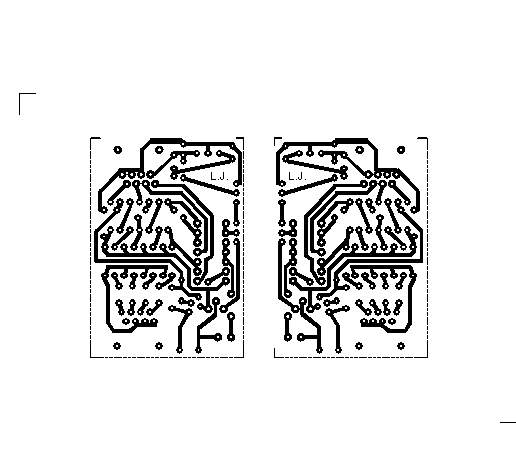
W podanych linkach znajdują się scematy ideowe, montażowe a także rysunek druku dla metody termotransferowej.
{kind=link}
{kind=link}
Opis instalacji i uruchomienia programu GuideDog
Elementy niezbędne do instalacji i działania programu GuideDog to system Windows (W98, Millenium lub XP, nie działa z NT nie próbowałem z W2000/2003), kamera z oprogramowaniem widzianym przez system operacyjny 'RelayBox' z kablami przyłączeniowymi oraz montaż z napędem i silnikami krokowymi z systemem sterowników dziłającymi na sygnały zegara i kierunku.
Pierwszym krokiem powinno być zainstalowanie w komputerze oprogramowania ASCOM (zestaw bibliotek i programów, na bazie których działa oprogramowanie GuideDog). Oprogramowanie można znależć pod adresem ASCOM gdzie należy ściągnąć i zainstalować program ascom41.exe .
Krok następny to ściągnięcie i instalacja oprogramowania GuideDog . Zalecam również zapoznanie się z instrukcją obsługi oraz z opisem funkcji programu.
Należy przeładować komputer aby nowe oprogramowanie zostało zauważone przez system. Zalecam także sprawdzenie jak ustawiony jest w komputerze liczbowy separator dziesiętny. Jeśli jest to przecinek to oprogramowanie nie daje się uruchomić informując zwykle o błędzie 'Type mismatch Run-time error 13'. Separator dziesiętny ustawia się zwykle w ustawieniach regionalnych (Start -> Ustawienia -> Panel sterowania -> Ustawienia regionalne -> Liczba->Symbol dziesiętny)
Przed uruchomieniem programu GuideDog należy zainstalować również oprogramowanie do obsługi kamery działającej w systemie guide. Jeśli system operacyjny wkryje kamerę to zapewne będzie ona dostępna w programie GuideDog z całym swoim natywnym oprogramowaniem konfiguracyjnym. Jeśli system nie widzi kamery to nie będzie widział jej także program GuideDog. Przed przystąpieniem do pracy z systemem GuideDog można ustawić tak wyciąg w sprzęcie optycznym oraz parametry kamery aby uzyskane obrazy gwiazd były ostre i odpowiednio jasne choć system potrafi śledzić także ledwo widoczne punkty a także 'rozmazane' plamy gwiazd (co jednak pogarsza zapewne dokładność prowadzenia)
Teraz można w zasadzie przystąpić do uruchomienia programu co powinno udać się już bez problemu.
Wygląd głównego ekranu programu GuideDog można znaleźć pod tym adresem. Pracę nalezy zacząć od wyboru zakładki Options gdzie można dopasować program do lokalnych warunków sprzętowych.
Zakładka Options ma dalsze 4 zakładki. W zakłądce Camera należy ustawić parametry stosowanej kamery w tym między innymi w jakim porcie LPT działa, jaki ma rozmiar pixel-a oraz czy działa jako modyfikowana (SC modified). W zasadzie ustawienia początkowe odnoszą się do kamer typu Vesta i mogą pozostać bez zmian dla tego sprzętu.
W zakładce GuideScope ustawia się ogniskową sprzętu optycznego, do którego dołączona jest kamera. Nie jest to krytyczny parametr ale powinien być oczywiście ustawiony odpowiednio do użytej ogniskowe.
W zakładce Guiding parameters należy ustawić współczynniki prowadzenia dl obu osi. Przyjmuje się z reguły, że powinny być one od 15 do 3 razy większe od prędkości śledzenia a więc od ok. 20 do ok. 50 sekund łuku na sekundę. Początkowe wartości tych parametrów można pozostawić bez zmian pamiętając jednak, że jeśli wybierze się większe ich wartości to korekty trwać będą krócej i odwrotnie. Parametry te, podobnie jak wszystkie inne można zmieniać podczas działania śledzenia co pozwala na bezpośrednie określenie czy przyjęta zmiana poprawia procedurę śledzenia czy ją pogarsza. Przyjmuje się, że przeciętna wartośc tych wspólczynników powinna wynosić ok. 30 sek. łuku na sekundę. Zarówno rozmiar celownika prowadzenia (okręgu zewnętrznego wokół obiektu prowadzenia) jak i dokładność powinny być dopasowane do klasy montażu. Im mniej dokładny montaż (większe luzy) tym większ p[owinny być tolerancje prowadzenia i dla konkretnego montażu należy ustalić te wartości eksperymentalnie zaczynając od większych wartości i stopniowo je zmniejszając aż do utraty prowadzenia przez montaż. W tej zakładce należy również określić czy korektą prowadzenia ma zostać objęta również druga oś montażu (w domyśle oś deklinacji). Dla systemów azymutalnych prowadzenie musi oczywiście odbywać się dla obu osi.
Ostatnia zakładka RelayBox pozwala na definicję sygnałów sterujących na wybranym porcie LPT i powinna w zasadzie pozostać bez zmian o ile nie bedzie zmianiany system przypisania sygnałów w opisanym dalej interface RelayBox-a.
Inne zakładki głównego menu pozwalają na bezpośrednie podłączenie komputera z programem do fabrycznych montaży i nie będą tu szerzej opisane.
Po ustawieniach zakładki Options można ponownie przejść do głównego menu gdzie również znajdują się elementy konieczne do dopasowania do lokalnych warunków. Dotyczy to głównie wartości cyfrowej pomiędzy klawiszami kierunku oznaczającej czas działania ruchu w wybranym kierunku w ms. Wartości 500 odpowiada zatem 0.5 sekundy. Użycie klawiszy kierunku pozwala na ustawienie obiektu we właściwym położeniu na ekranie przed rozpoczęciem procedury guide czyli jest ręczną korektą położenia systemu. Inne ustawienia powinny na razie pozostać bez zmian. Bardzo istotne jest aby z pomocą klawiszy kierunku określić, w którą stronę porusza się montaż. Zasadą jest tu aby użycie klawisza N powodowało ruch obiektu w górę, użycie klawisza S ruch obiektu w dół, klawisza W ruch obiektu w lewo a klawisza E ruch obiektu w prawo. Ruchy N-S oraz E-W powinny odbywać się możliwie dokładnie w pionie i poziomie ekranu. Jeśli tak nie jest to należy obrócić kamerę i ponownie wykonać próbę. Na tą czynność nalezy poświęcić odpowiednio duzo czasu co zaprocentuje później podczas pracy guide. Przestrzegam również przed wykorzystaniem opcji Rewerse do zmiany kierunku N-S i E-W co jest możliwe ale mylące w praktyce.
Po wyregulowaniu kierunku przesuwania się obiektów podczas sterownia klawiszami kierunku a jeszcze przed rozpoczęciem procedury guide można dodatkowo poprawić ustawienia kamery używając klawisza Focus. W tym trybie obraz jest najbardziej płynny co pozwala na dobranie zarówno ostrości obrazu jak i parametrów naświetlenia w oprogramowaniu kamery.
Procedura guide zaczyna się od wyboru klawisza Preview. Na ekranie pojawia się obraz z kamery w którym należy wybrać obiekt prowadzenia. Zanim zostanie uruchomiona procedura guide celowe jest aby obiekt ten znajdował się mniej więcej w środku pola kamery co można uzyskać używając klawiszy kierunku. Krok następny polega na wyborze klawisza Lock, którego kolor zmienia się na żółty a po wskazaniu kursorem na obiekt i synchronizacji Lock z obiektem zmienia się na kolor zielony. Jednocześnie obiekt prowadzenia otoczony zostaje celownikiem składającym się z dwóch współśrodkowych okręgów. Aby włączyć prowadzenie należy nacisnąć klawisz Guide, który zmieni kolor na zielony co sygnalizuje poprawność działania systemu. Od tej chwili ruchy montażu będą zgodne z wymaganymi dla prowadzenia za wybranym obiektem. Uzycie klawisz Center powinno powodować stopniowe przesunięcie się obiektu otoczonego okręgami celowników na środek pola widzenia kamery i nie ma znaczenia dla samej procedury prowadzenia..