Nazwa
Opis
Zdjęcie
Oprogramowanie do AstroPilota, motofocuser-a, sterownika silnika krokowego, systemu sterowania mikrokrokowego i goto
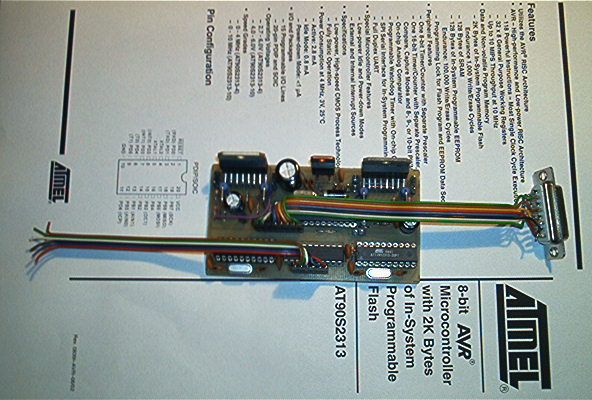
Oprogramowanie użytkowe napisane dla mikrokontrolera Atmel AT90S2313
koszt oprogramowania do AstroPilota lub sterownika silników krokowych wgrany do przesłanego do zaprogramowania własnego układu 0 PLN (koszt przesyłki)
koszt oprogramowania z jednym mikrokontrolerem AT90S2313 14 PLN
koszt oprogramowania z jednym mikrokontrolerem ATMega8 - 24 PLN
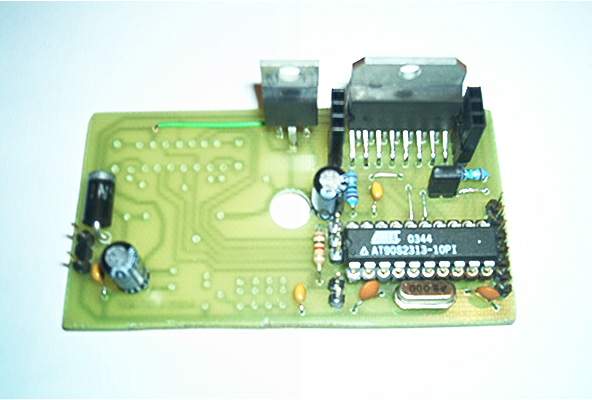
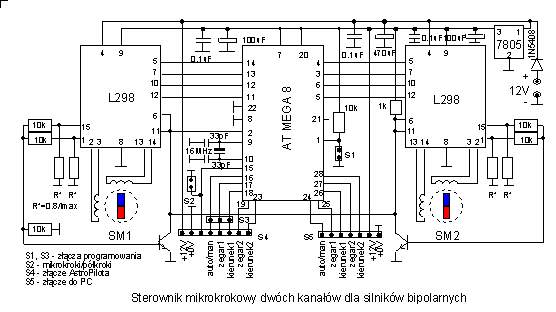
Sterownik silników krokowych bipolarnych ze sterowaniem mikrokrokowym z podzialem kroku na 10 - jest to częściowa realizacja układu pełnego sterowania ograniczona do układu sterowania mikrokrokowego ze wzmacniaczami mocy w dwóch kanałach
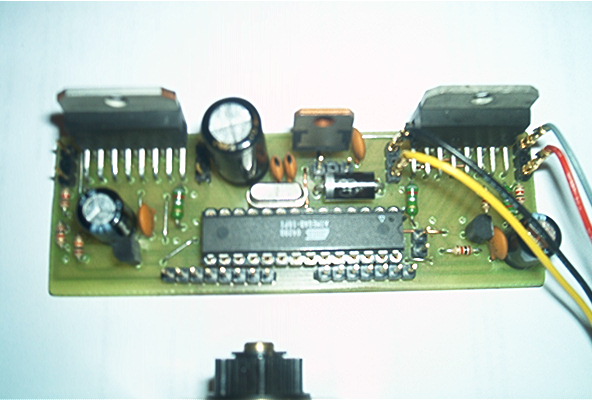
Pełny układ ze sterowaniem dla dwóch silników - cena XXX PLN, Układ zawiera 2 normalizatory sygnału (ATiny2313), automatykę i sterowanie mikrokrokowe (ATMega8) i 2 wzmacniacze mocy L298 dla silników krokowym bipolarnych (ale pracują też silniki unipolarne). Napięcie zasilania od 6 do 18V, Może pełnić ograniczone funkcje jak układopisany powyżej ale jest najbardziej kompletnym układem działającym z AstroPilotem i programem goto pl do sterowania teleskopami paralaktycznymi i azymutalnymi.
Procesor sygnału gotopl
uklad w przygotowaniu
Uklad zastępuje komputer PC z oprogramowaniem gotopl.
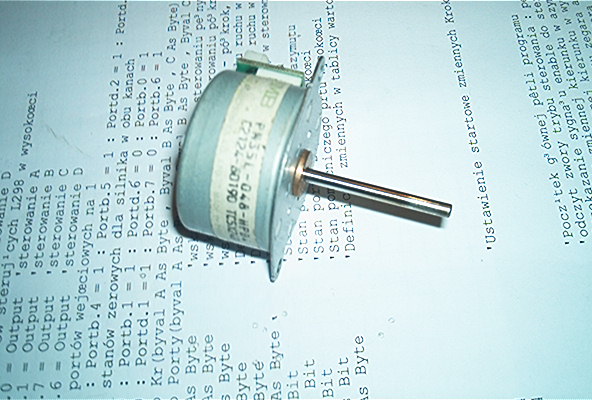
Silnik krokowy 3
Silnik unipolarny (5 wyprowadzeń) 12V, oporność uzwojenia 75 omów, 1.8 stopnia/krok, moment prawdopodobnie ok. 10-20 Ncm. Wymiary: 39/39/31mm, oś średnica 5mm, dlugość osi 10-20, na osi znajduje się koło o srednicy 17mm i wysokosci 8mm, mocowanie czterema wkrętami M3 w rozstawie 31mm.
Zastosowanie: platforma paralaktyczna, motofocuser, napęd teleskopu z przekladnią co najmniej 1:5
Cena 15 PLN (zakup 2 dowolnych silników -20%, 3 silników -30%, 4 i więcej -50%)

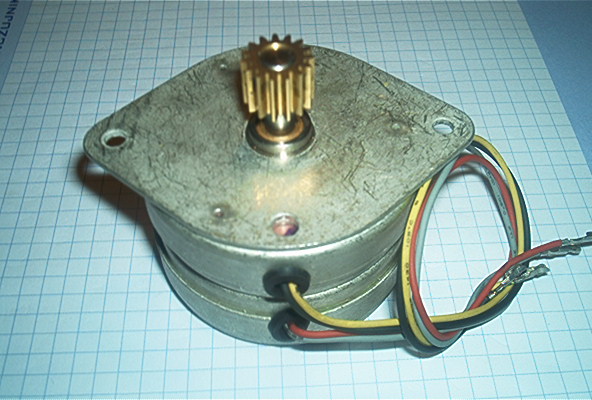
Silnik krokowy 5
Silnik unipolarny (5 wyprowadzen), PM35L-048, 24V, oporność uzwojenia 35 omow, 7.5 stopnia/krok, moment prawdopodobnie ok. 5-10 Ncm. Wymiary: średnica 35mm, wysokość 21mm, oś średnica 3mm, dlugość osi 30mm, mocowanie dwoma wkrętami M3 w rozstawie 42mm.
Zastosowanie: motofocuser, napęd teleskopu z przekladnią co najmniej 1:10
Cena 15 PLN (zakup 2 dowolnych silników -20%, 3 silników -30%, 4 i więcej -50%)
Silnik krokowy 7
Silnik bipolarny (4 wyprowadzenia), Canon RG5-0764, 12V, oporność uzwojenia 2.5 oma, 7.5 stopnia/krok, moment prawdopodobnie ok. 30-60 Ncm. Wymiary: średnica 57mm, wysokosc 28mm, oś średnica 4mm, dlugość osi 12mm, mocowanie dwoma wkrętami M3 lub M4 w rozstawie 31-54 mm.
Zastosowanie: napęd teleskopu z przekladnią co najmniej 1:2
Cena 15 PLN (zakup 2 dowolnych silników -20%, 3 silników -30%, 4 i więcej -50%)
Silnik krokowy 9
Silnik bipolarny (4 wyprowadzenia), AIRPAX S60L048S12, 5V, oporność uzwojenia 4.55 oma, 7.5 stopnia/krok, moment prawdopodobnie ok. 30-60 Ncm. Wymiary: średnica 59mm, wysokość 37mm, oś średnica 6.3mm, dlugość osi 16mm z kołem zębatym 15 zębow, mocowanie wkrętami M4 w rozstawie 67.5mm.
Zastosowanie: napęd teleskopu z przekladnią co najmniej 1:2
Cena 25 PLN (zakup 2 dowolnych silników -20%, 3 silników -30%, 4 i więcej -50%)
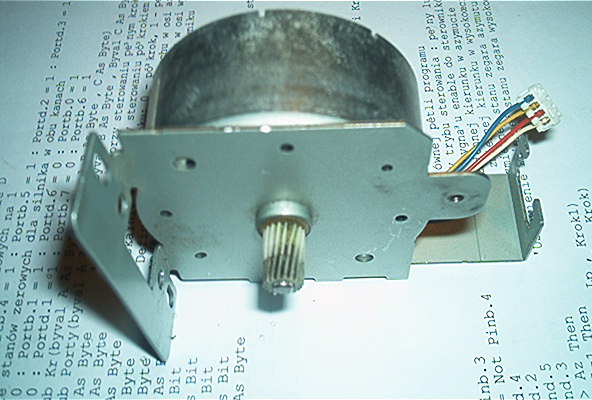
Silnik krokowy 10
Silnik bipolarny (4 wyprowadzenia), NEC HB-306-B2202, 12V, oporność uzwojenia 150 omow, 1.8 stopnia/krok, moment prawdopodobnie ok.10-20 Ncm. Wymiary: 40/40/30mm, oś średnica 5mm, na osi znajduje się koło o średnicy 17mm i wysokości 10mm, dlugość osi 12mm, mocowanie wkrętami M3, 4 na w rozstawie 31mm lub 2 w rozstawie 59mm.
Zastosowanie: motofocuser, napęd teleskopu z przekladnią co najmniej 1:10

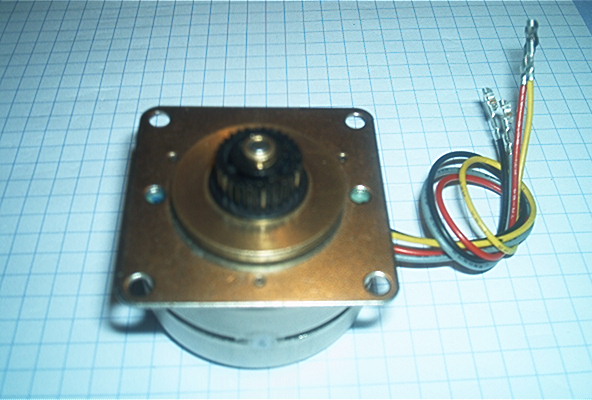
Silnik krokowy 11
Silnik bipolarny (4 wyprowadzenia), AIRPAX S42M048S79-M1, 5V, oporność uzwojenia 9.1 oma, 7.5 stopnia/krok, moment prawdopodobnie ok.10-20 Ncm. Wymiary: średnica 41.5mm, wysokość 22mm, oś średnica 5mm, na osi znajduje się kolo zębate o średnicy 13.5mm i 31 zębach, dlugość osi 7mm, mocowanie wkrętami M3, 4 w rozstawie 35mm.
Zastosowanie: motofocuser, napęd teleskopu z przekladnią co najmniej 1:10
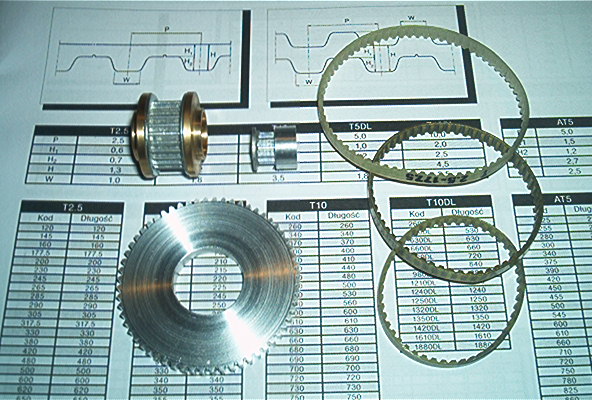
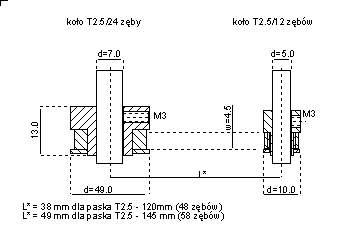
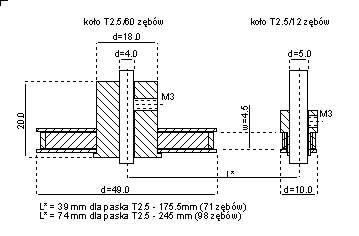
Przekładnia mikropaskowa synchroniczna
Przekładnia składa się z dwóch koł zębatych oraz paska synchronicznego systemu T2.5. Na zdjęciu pokazane zostały elementy przekładni: koła i paski o rożnej dlugości. Na rysunkach pokazane zostaly wymiary poszczególnych elementow przekładni, najważniejsze wymiary w tym także osie kół oraz odległości osi w zależności od użytego paska zębatego. Paski zębate mają szerokość 4mm a koła zębate w cześci współpracującej z paskami mają szerokość 4.5mm. Koła zębate mocowane są do osi za pomocą wkrętow M3. Koło T2.5/60 ma oś o średnicy 4mm, którą można łatwo powiększyć przez rozwiercenie do zadanej wielkości.
Brak
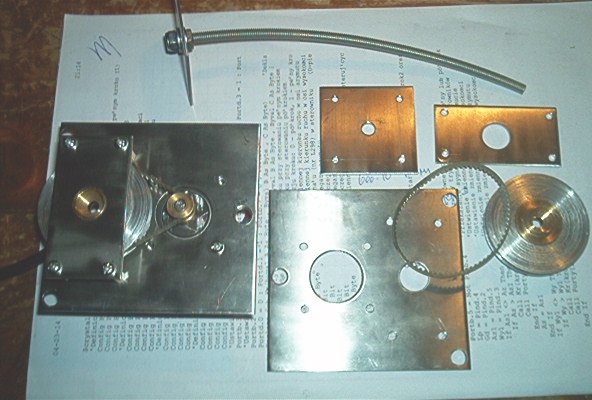
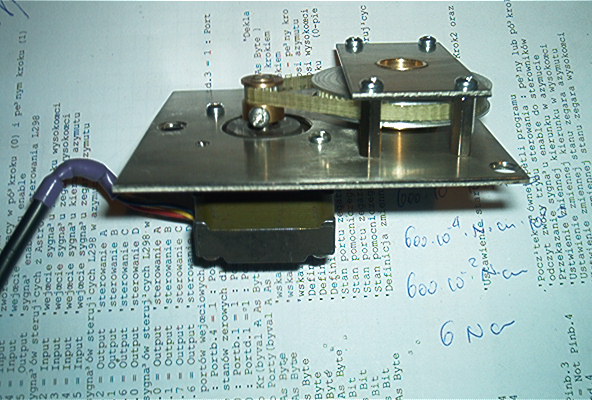
Kompletny system napędowy mikropaskowy z przełożeniem 1:5 do 'koziolka'
Zespół napędowy składa się ze wsporników wykonanych z blachy nierdzewnej, kompletu kół zębatych (12 oraz 60 zebów) z paskiem zębatym 177.5mm oraz śruby łukowatej M6 o promieniu gięcia 300mm ze wspornikiem. Na zdjęciu pokazana zostala przekladnia w komplecie z silnikiem krokowym - może to być np. jeden z pokazanych silnikow 1, 2, 3 lub 5 o rozstawie śrub mocujących 31mm (silnik nie wchodzi w skład zestawu). W komplecie znajdują się także gumowe podkładki i wkręty mocujące.
Dokumentacja do wykonania koziołka
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}