wróć
wróć |
Teoria napędu nożycowegoNapęd nożycowy, jak nazwa wskazuje, składa się z dwóch ramion połączonych we wspólnym punkcie obrotu. Jeśli usztywnić jedno z ramion a drugie odpychać uzyska się ruch drugiego ramienia wokół wspólnej osi. Jeśli siła odpychająca znajduje się daleko od osi obrotu a obracana masa znajduje się blisko osi obrotu wtedy dodatkowo taki napęd zachowuje się jak dźwignia prosta o przełożeniu równym proporcji promieni. Jeśli obracana masa znajduje się dokładnie na osi obrotu wtedy niewielką siłą uda się obrócić sprzęt optyczny oraz fotograficzny o wielkości ograniczonej głównie nośnością statywu na którym zamontowany jest napęd. Jeśli ruchome ramie popychane jest jest za pomocą śruby dochodzi dodatkowe przełożenie wynikające z jej użycia i do napędu można zastosować silnik o niewielkich wymiarach. 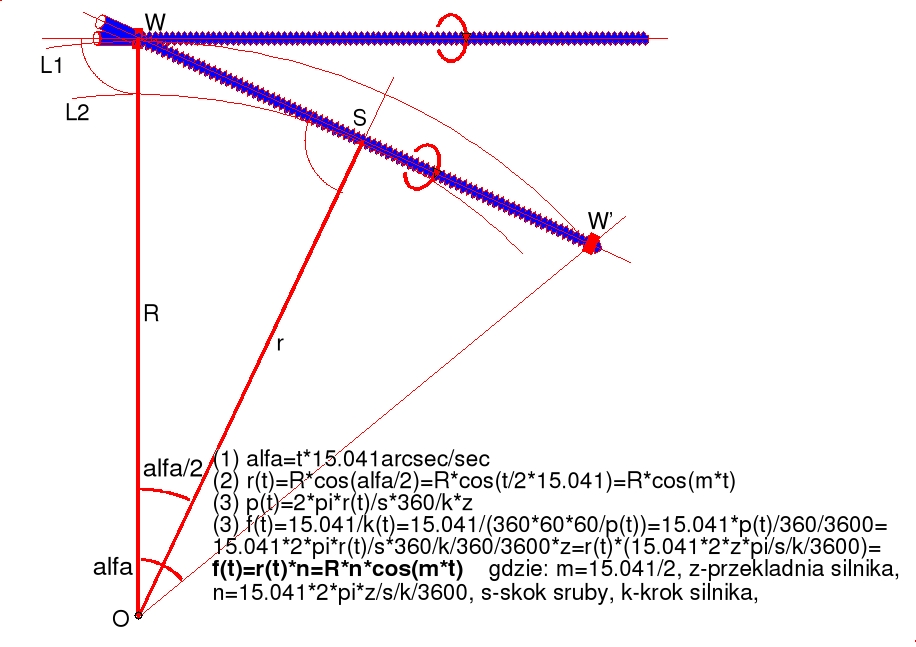 Rysunek opisuje główną koncepcję napędu nożycowego. Oś obrotu przechodzi przez punkt O. Na osi zamocowane są ramiona: nieruchome i ruchome - oba o długości R. Na początku ruchu oba ramiona pokrywają się ze sobą a ich ruch odbywa się po łuku L1. Śruba napędowa, przymocowana jest na trwałe do ramienia nieruchomego i za pomocą wodzika W do ramienia ruchomego. Śruba ta jest początkowo prostopadła do obu ramion i obracana jest za pomocą silnika krokowego na ramieniu nieruchomym i z czasem rozpycha oba ramiona co powoduje, że pomiędzy ramieniem nieruchomym a ruchomym tworzy się kąt zależny od czasu działania napędu. Jeśli na ramieniu ruchomym, najlepiej w osi obrotu tego ramienia, zamocuje się teleskop lub inny sprzęt obserwacyjny a ramię będzie się obracać równomiernie z prędkością nieba (15.041 arcsec/sek) to obraz w teleskopie pozostanie nieruchomy pozwalając na komfortową obserwację z dużymi powiększeniami a nawet na astrofotografię. Warunkiem prawidłowego działania takiego napędu jest oczywiście stała prędkość obrotowa ramienia ruchomego w czasie i to w dodatku z prędkością nieba. A zatem, ruch ramienia ruchomego (kąt obrotu) powinien odbywać się zgodnie ze wzorem: alfa = 15.041 arssec/sek * t (sek) (form. 1) Ponieważ do poruszania napędem używana jest śruba to wartość przekładni tego napędu można określić na podstawie długości ramienia i paramterów śruby (skok) według wzoru:p(t) = 2 * pi * r(t) / s * 360 / k * z (form. 3) gdzie: p(t) - całkowita przekładnia napędu zależna od czasu2 * pi * r(t) - obwód okręgu na którym działa śruba napędowa s - skok śruby napędowej 360 / k - przekładnia silnika krokowego o kroku k z - dodatkowa przekładnia mechaniczna (np. przekładnia trybowa silnika krokowego) t - czas działania napędu Jedyną wartością zmienną w tym wzorze jest promień r(t), który w momencie startu ma wartość R. Promień r(t) jest symbolicznym promieniem okręgu wzdłuż ktorego działa śruba napędowa w każdej chwili t ruchu napędu. Tylko jeśli śruba napędowa jest prostopadła do promienia okręgu na którym działa można określić dokładnie przekładnię napędu. A zatem po pewnym czasie, kiedy ramiona zostaną rozwarte o kąt alfa napęd powinien być prowadzony z prędkością 15.041 arcsec/sek ale na wirtualnym kole o promieniu r. Promienie R i r pozostają w każdej chwili t ze sobą w związku określonym przez prawo Pitagorasa tak jak to pokazuje kolejny wzór: r(t) = R * cos ( alfa/2 ) = R * cos ( 15.041/2 * t ) (form. 2) Oczywiście na starcie, kiedy kąt pomiędzy ramionami ma wartość 0 stopni a cos(0)=1 wtedy R = r. Z czasem r staje się coraz mniejsze co oznacza w praktyce, że śruba napedzająca obraca koło o coraz mniejszej średnicy i powinna to robić coraz wolniej.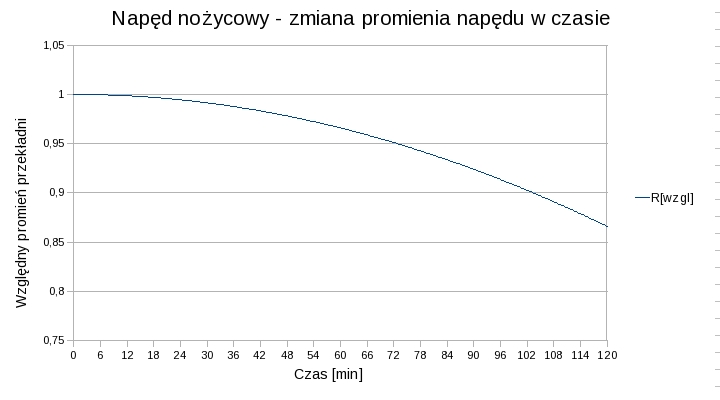 f(t) = 15.041 arcsec/sek / kr(t) = 15.041 / (360*60*60 / p(t)) (form. 4) gdzie kr(t) to krok sterowania napędem - zmienny w czasie Po podstawieniu wcześniej wyliczonych zmiennych można powiedzieć, że częstotliwość sterowania silnikiem krokowym, dla uzyskania liniowego obrotu ramienia w napędzie nożycowym ma postać: f(t) = r(t) * n = R * n * cos (m * t) (form. 5) Generalnie więc biorąc sterowanie napędem zależne jest od cosinusa czasu działania napędu a wielkości R, n i m to stałe: R - promień ramion napędu n = 15.041 * 2 * pi /z /s /k /3600 - stała wynikająca z parametrów śruby i silnika napędu m = 15.041/2 - połowa kąta prędkości nominalnej nieba Zakładając, że promień R=300mm, silnik ma krok 15 stopni i przekładnię wewnętrzną 1:76 a krok śruby napędzającej ma wartość 0.5mm uzyska się krok sterowania napędem kr mniejszy niż 0.2 arcsec oraz częstotliwość sterowania silnikiem ok. 80 Hz. Oczywiście, programując sterowanie należy zadbać aby wszystkie jednostki wyrażone były w jednakowych wartościach (metrach lub milimetrach, stopniach lub sekundach itp). |
wróć |