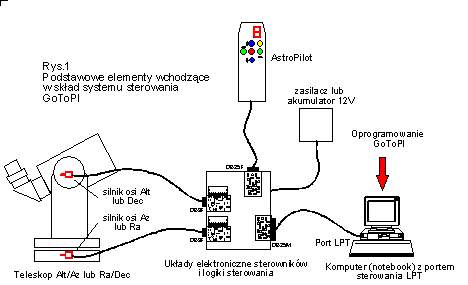
System sterowania gotopl składa się zasadniczo z trzech części:
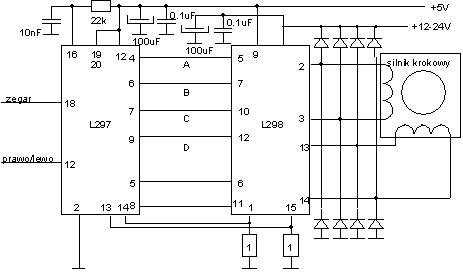
- Sterowników silników krokowych i układów dopasowujących. Przykład takiego rozwiązania dla MTO znajdziesz tu.
- Oprogramowania użytkowego gotopl.
Na rys.1 pokazany został pełny system sterowania gotopl
{kind=link}