Korekta pracy platformy Prędkość pracy platformy zależy w pewnym stopniu od jej obciążenia (ugięcie rolki napędowej) dlatego na początku użytkowania jej z nowym teleskopem warto przeprowadzić korektę jej prędkości pracy. Korektę należy przeprowadzać po wykonaniu ustawienia platformy na GP (ustawienie na GP) .
Korektę prędkości należy przeprowadzać wykorzystując obiekty leżące aktualnie w kierunku południowym na równiku niebieskim. Dla takiego ustawienia błąd spowodowany niedokładnością ustawieniana platformy na GP będzie miał najmniejszy wpływ na wynik korekty. Do wykonania korekty najlepiej jest wykorzystać szukacz lub teleskop z małym powiększeniem (podobnym do tego jakie daje szukacz). Korektę należy wykonać wypełniając kolejne kroki:
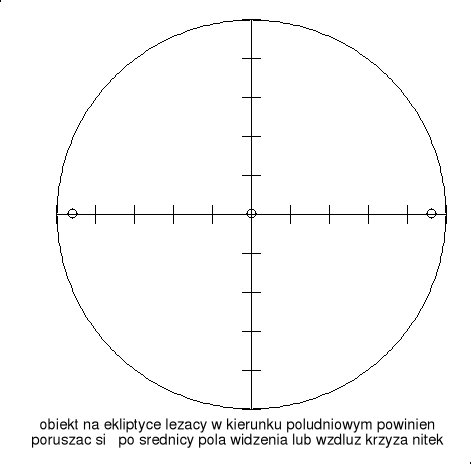
1. Wybierz w szukaczu obiekt leżący na równiku (o deklinacji bliskiej zera) w kierunku południowym.
2. Ustaw krzyż szukacza tak aby obiekt 'ślizgał' się po linii poziomej szukacza przy obrocie teleskopu wokół osi azymutalnej teleskopu (jeśli szukacz nie ma krzyża to ustaw obiekt w linii średnicy obrazu i sprawdź jak przebiega ta linia przesuwając obiekt w polu widzenia przez obrót teleskopu wokół osi azymutalnej).
3. Ustal aktualne pole widzenia np. mierząc czas przejścia w sek. obiektu po średnicy pola widzenia i monożąc ten czas przez 15.041 arcsrc/sek. Podczas tego pomiaru platforma powinna być nieruchoma co oznacza, że trzeba odłączyć zasilanie. Dla przykładu, jeśli czas przejścia obiektu wynosi 120 sek. to pole widzenia wynosi 120sek * 15.041arcsec/sek = 1805 arcsec (ok. 30.1 minuty łuku)
4. Włącz platformę a następnie ustaw ją w około 1/3 lub 2/3 przebiegu po czym ustaw obiekt w centrum pola widzenia a następnie obserwuj położenie obiektu przez 10 lub 15 minut obserwując odchylenie obiektu (Delta) od położenia środkowego w kierunku ustalonego wcześniej poziomu (wzdłuż krzyża nitek). Odchyłka w pionie nie ma znaczenia dla korekty prędkości. Jeśli obiekt zdryfował na brzeg pola widzenia szybciej niż wcześniej przyjęty czas obserwacji wtedy zanotuj czas do zniknięcia obiektu z pola widzenia. Należy ustalić również czy błąd w położeniu obiektu wskazuje większą czy mniejszą prędkość platformy. Generalnie biorąc dryf obiektu na prawo wskazuje na mniejszą prędkość platformy a dryf obiektu na lewo na większą prędkość platformy od prędkości nieba. Odchyłkę obiektu (Delta) należy ustalić możliwie dokładnie biorąc pod uwagę możliwości. Jednak całkowicie wystarczająca jest ocena rzędu 1/10 pola widzenia na podstawie np. znaczników na nitkach krzyża lub po prostu 'na oko' - i tak po korekcie dokonanej z niewielką nawet precyzją praca platformy powinna być dokładniejsza niż przed korektą.
5. Znając wartość odchyłki Delta należy przeprowadzić obliczenia współczynnika korekcyjnego prędkości pracy platformy k = (droga platformy) / (droga nieba) a następnie przemnożyć bieżącą sekwencję sterującą platformy przez wyliczony współczynnik k. Droga platformy będzie wynosić oczywiście sumę lub różnicę drogi nieba i zanotowanej odchyłki Delta. Oczywiście nową sekwencję sterującą należy wprowadzić do sterownika i ponownie sprawdzić działanie platformy. Drogę nieba należy wyliczyć mnożąc czas obserwacji w sekundach przez wartość 15.041 arcsec/sek.
6. Przykład obliczeń korekcyjnych: założmy, że dla początkowego ustawienia sekwencji sterującej: "0 28331" obserwacja trwała 10 minut w czasie których obiekt zdyrfował na prawo o 12 arcmin łuku (12*60=720 arcsec) czyli platforma była wolniejsza niż niebo. W czasie 10 minut czyli 600 sekund, niebo obróciło się o 600 sek * 15.041 arcsec/sek = 9024.6 arcsec. W tym czasie platforma wykonała drogę o Delta mniejszą czyli 9024.6arcsec - 720 arcsec = 8304, 6 arcsec a współczynnik korekcyjny wynosi k = 8304.6arcsec / 9024.6arcsec = 0.92. Wartością k należy przemnożyć sekwencję sterującą na pozycjach 2-6 czyli 0.92 * 28331 = 26065 (wynik należy zaokrąglić do najbliższej liczby całkowitej). Nowa sekwecja sterująca będzie teraz wynosić "0 26065" i tą wartość należy wprowadzić do sterownika w sposób opisany w linku tytułu arkusza konfiguracji AstroPilota (ustawienie AstroPilota) Fizyczne znaczenie korekcji sekwencji sterującej wynika z konstrukcji AstroPilota. Liczba na którą składają się cyfry 2-6 sekwencji oznacza w praktyce podzielnik częstotliwości wzorcowej. Tak więc jeśli współczynnik k będzie miał mniejszą wartość od 1 to nowa sekwencja będzie mniejsza a zatem podzielnik częstotliwości będzie mniejszy i silnik platformy sterowany będzie większą częstotliwością i odwrotnie, jeśli współczynnik k będzie większy od 1 wtedy podzielnik wzrasta co skutkuje obniżeniem częstotliwości sterującej i platforma działa wolniej.
Zwykle dla ustalenia prędkości pracy platformy wystarcza jedna lub dwie korekty przeprowadzone według podanych zasad. Po wykonaniu korekty można cieszyć się pięknym, nieruchomym widokiem w okularze teleskopu przy największych powiększeniach obrazu ;-) |
ustalenie drogi obiektu podczas obrotu teleskopu wokół osi azymutalnej 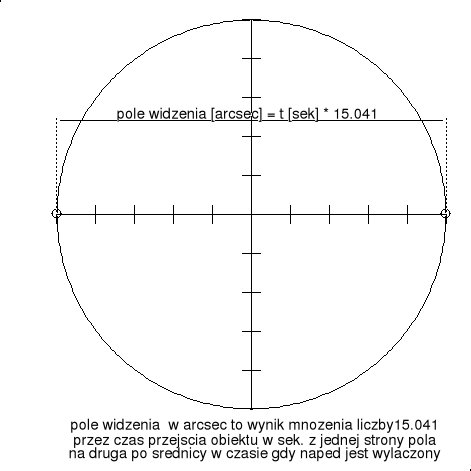 ustalenie szerokości pola widzenia (napęd platformy wyłączony) 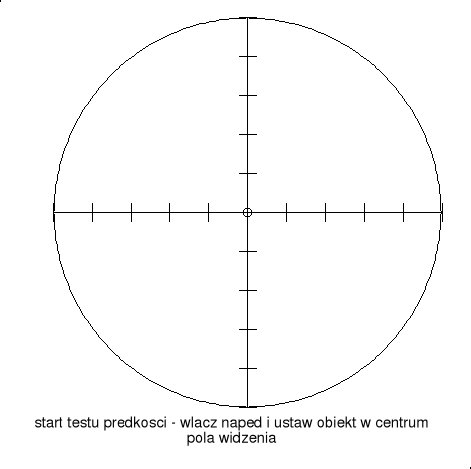 start testu prędkości (napęd platformy działa) 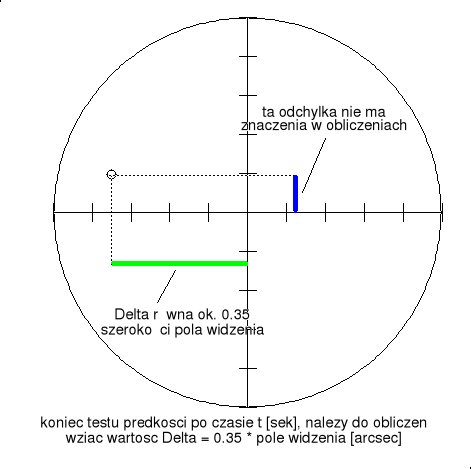 wyznaczenie odchyłki Delta |