|
|
|
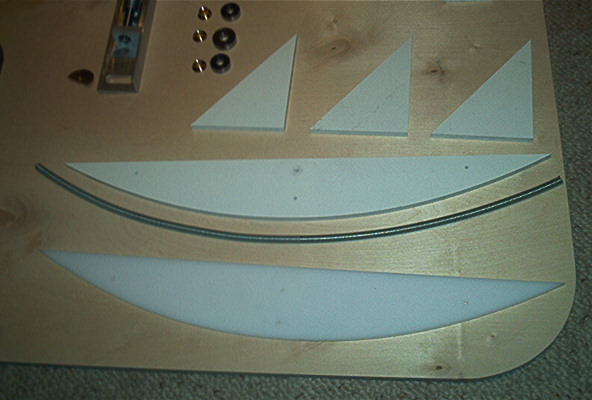
| Reliazacja praktyczna
dotyczy platformy działającej optymalnie na szerokości geograficznej zbliżonej
do 51 stopni.
Tu widać prawie wszystkie
elementy platformy na zdjęciu rodzinnym. Tłem jest jedna z płyt platformy
już po wstępnej obróbce.
|
|
Dwa odcinki koła
cięte po jego łuku będą służyć jako elementy części północnej: łożyskowanie
oraz jako napęd górnej, ruchomej części platformy. Elementy te wykonane
są z twardego plastyku. Element stanowiący łożysko (na dole zdjęcia) ma
grubość 6mm a element stanowiący napęd (górny) ma grubośc 8mm dokładnie
tyle ile pokazana pomiędzy elementami śruba M8 wygięta już wstępnie z
krzywizną zblizoną do krzywizny odcinka koła napędowego. Oba odcinki koła
zostaną ze sobą skręcone tworząc z mniejszymi trójkątami łożysko północne. |
|
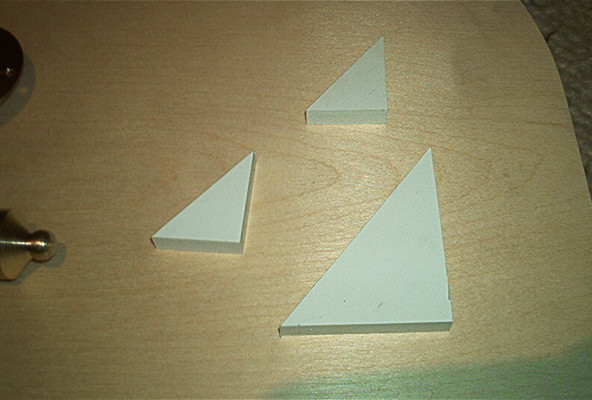
| Wsporniki odcinków
kół łożyskującego i napędowego to trójkąty proporcjonalne o jednym kącie
równym 90-51=39 stopni. Większy z trójkątów zamocowany zostanie w środku
wycinków gdzie szerokośc wycinka koła jest największa a pozostałe zamocowane
zostaną symetrycznie na brzegach. |
|
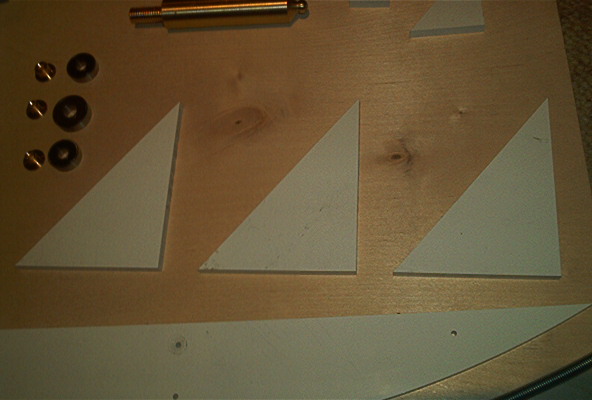
| Pokazane trzy jednakowe
trójkąty (jeden z kątów ma oczywiście wartość 90-51=39 stopni) wspierać
będą aluminiowy wspornik mocowany do płyty dolnej, do której z kolei zamocowane
zostaną łożyska części północnej oraz zespół napędowy. |
|
| Łożysko części północnej
jest jednopunktowe. Na zdjęciu widać gniazdo i czop łożyska wykonane z mosiądzu.
Na zdjęciu nie pokazana została podkładka o grubości 2mm, która zapewnia,
że łożysko południowe znajduje się dokładnie 100mm ponad płytą nieruchomą
platformy. |
|
| Łożyskowanie strony
północnej wykonane zostanie za pomocą 3 lub 4 łożysk. Dwa z nich łożyskować
będą odcinek koła północnego a trzecie lub trzecie i czwarte podpierać będą
ten odcinek prostopadle do łożysk głównych. Łożyska mocowane będą do wspornika
poprzez specjalne tulejki z kołnierzem. |
|
| Napęd platformy umożliwi
uniwersalny system napędowy opisany wcześniej dla synty 200/1200. Napęd
ten zostanie nieznacznie zmodyfikowny poprzez zwiększenie odstępu poparcia
osi śruby napędowej bowiem promień śruby łukowatej dla platformy ma około
500mm. |
|
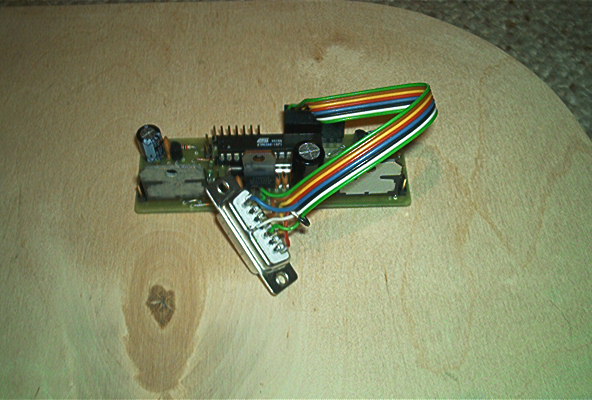
| Silnik krokowy sterowany
będzie poprzez sterownik półkrokowy lub mikrokrokowy. Tu na zdjęciu pokazany
został sterownik mikrokrokowy zmontowany do pracy w dwóch kanałach. Oczywiście
do sterowania silnikiem platformy potrzebny jest tylko jeden kanał sterujący. |
|
| Właściwe impulsowanie
silnika krokowego następować będzie dzięki AstroPilotowi. AstroPilot jest
programowalny więc możliwe jest dopasowanie jego sygnału do każdej przekładni
napędowej. Nie jest więc istotne aby znać wartość tej przekładni od samego
początku prac. Można ją ustalić eksperymantalnie po wykonaniu urządzenia
a nawet pomierzyć i przyjąć wartość średnią dla całego przbiegu ruchu platformy.
Do takiej wartości przekładni można ostatecznie zaprogramować AstroPilota. |
|