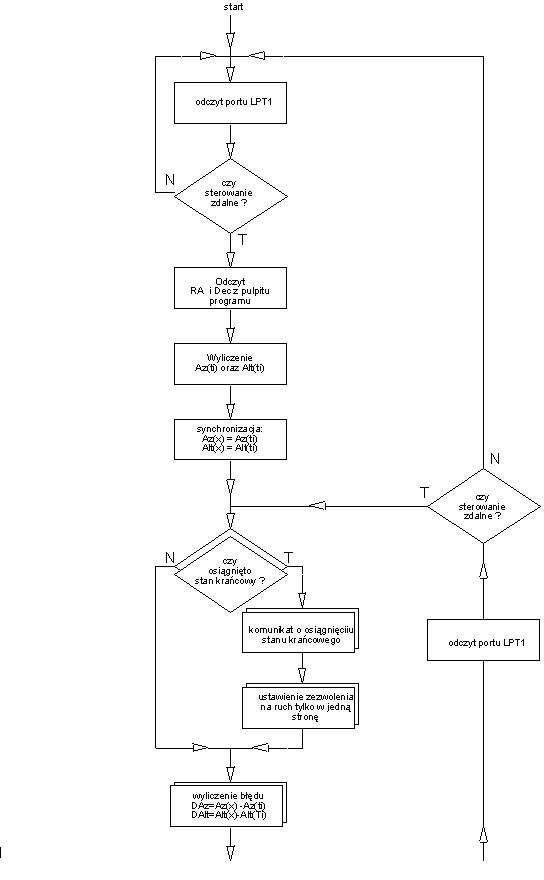
Rysunek 1 Algorytm część 1
Algorytm wylicza na podstawie wprowadzonych danych Ra/Dec parametry ciała niebieskiego w układzie Alt/Az. Przeliczenia dokonywane są w czasie rzeczywistym z częstotliwością ok. 2 razy w ciągu sekundy. Podstawowy moduł przeliczający został przeze mnie nazwany ElCapitano w związku z bezpośrednią inspiracją Darka - El Capitano aktywnego bywalca stron dyskusyjnych na forum teleskopy.pl. Program stanowi cykl zamknięty, w którym z tą samą częstotliwością sprawdzany jest sygnał synchronizacji z napędu MTO. W momencie odczytu sygnału synchronionizacji program zakłada zgodność napędu z położeniem wybranego ciała niebieskiego i od tego momentu generuje sygnały sterujące silnikami Alt i Az biorąc pod uwagę fizyczną wartość kroku sterowania. Program w każdym cyklu bada też czy napęd w każdym ze stopni swobody osiągnął położenie krańcowe co jest sygnalizowane na pulpicie komunikatem w kolorze czerownym oraz wyłączeniem dalszej możliwości ruchu w tym kierunku. W trybie synchronizmu maksymalny błąd sterowania wynosi 1 krok, który zostaje niezwłocznie wykonany. Dla mojego napędu i przekładni 38400 razy, impulsy sterujące pojawiają się co ok. 1.5-10 sek. w zależności od trajektorii ciała niebieskiego.