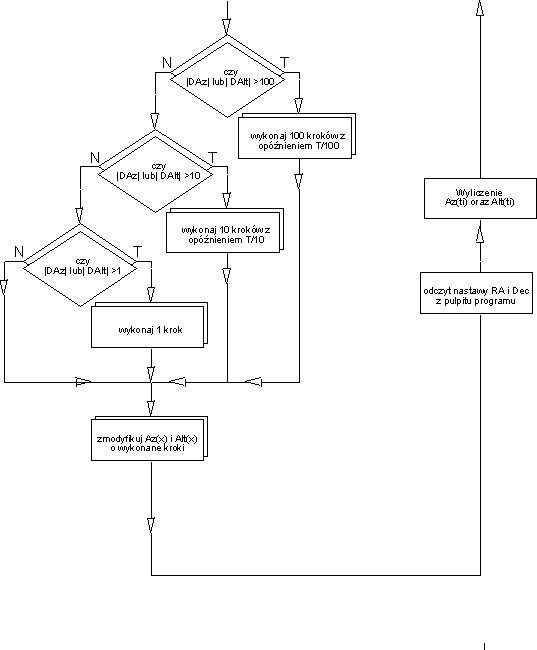
Rysunek 2. Algorytm część 2.
Ustawienia danych do sterowania można zmieniać w każdej chwili działania algorytmu. Wprowadzenie na przykład innych współrzędnych ciała niebieskiego powoduje niezwłoczne przeliczenie oraz wyliczenie błędu sterowania, który wynosić może setki lub tysiące kroków. Niezwłocznie też algorytm generuje ciągi impulsów dla silników w obu osiach. W tym trybie można mówić o pracy napędu typu GOTO. Dla zmniejszenia opóźnień w działaniu interface programu przestawienie odbywa się 'skokami' po nie więcej niż 100 kroków w każdej pętli algorytmu. Jednocześnie regulowana jest częstotliwość impulsów w taki sposób aby była ona proporcjonalna do ich ilości. Zapewnia to 'łagodne' dojście do ustalonej pozycji. Przestawianie napędu jest dość szybkie. Dla przykładu zmiana położenia w azymucie o 90 stopni trwa kilka sekund.