PROCESOR SYGNAŁU
goto pl – opis i instrukcja obsługi
Procesor stanowi alternatywę dla programu goto pl pracującego na komputerze PC. Zawiera większość funkcji realizowanych przez program goto pl a w tym między innymi:
-
Uwzględnia w obliczeniach czas obserwacji
-
Uwzględnia w obliczeniach miejsce obserwacji
-
Uwzględnia w obliczeniach rodzaj używanego montażu
-
Uwzględnia w obliczeniach parametry (przekładnie) używanego montażu
-
Posiada wbudowaną bazę o obiektach dla ponad 80 najjaśniejszych gwiazd, wszystkich obiektów Messier (110), ponad 400 obiektów IC i NGC widzianych na szerokościach geograficznych Europy,
-
Umożliwia wprowadzenie do 10 własnych obiektów
Procesor działa w oparciu o 8 bitowy mikrokontroler RISC Atmel AT Mega32 wytwarzając na wyjściu sygnalizację służącą do sterowania silnikami krokowymi montaży paralaktycznych (Ra/Dec) oraz azymutalnych (Az/Wys).
Procesor jest kompatybilny z innymi urządzeniami systemu goto pl a w szczególności wymaga do pracy AstroPilota oraz specjalnego kabla połączeniowego do sterownika mikrokrokowego.
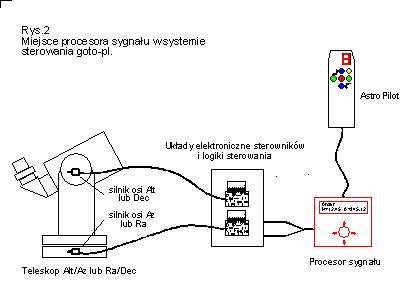
Na rys. 1 i 2 pokazana została konfiguracja systemu sterowania w przypadku używania komputera PC (rys.1) oraz procesora sygnału (rys.2).
Podczas pracy z komputerem PC AstroPilot dołączony jest bezpośrednio do sterownika mikrokrokowego, podobnie jak i komputer PC z pracującym programem goto pl. Połączenie sterownika mikrokrokowego z komputerem PC odbywa się za pomocą prostego kabla z końcówkami DB25F i M. Kabel ten może mieć długość co najmniej 10m. AstroPilot dołączony jest także bezpośrednio do sterownika mikrokrokowego.
Jeśli do sterowania używany jest procesor sygnału to wymagany jest dodatkowy, podwójny kabel łączący procesor sygnału ze sterownikiem. Kabel ten zakończony jest od strony sterownika wtykiem DB25F skąd zostaje rozdwojony na część zakończoną wtykami DB25F oraz DB15M służącymi do podłączenia do sterownika mikrokrokowego.
Praca ręczna (sterowanie za pomocą AstroPilota) możliwe jest kiedy układ działa z PC, z procesorem sygnału lub też wyłącznie z dołączonym AstroPilotem.

Montaże i współpracujące silniki napędowe
System sterowania goto pl umożliwia pracę z każdym typem montażu, zarówno systemu paralaktycznego (Ra/Dec) jak i azymutalnego (Az/Wys) napędzanych silnikami krokowymi.
Użyty w systemie sterownik mikrokrokowy poprawia rozdzielczość użytego silnika krokowego 10 krotnie. Oznacza to, że jeśli w sterowaniu podstawowym silnik wymaga np. 200 impulsów do wykonania całego obrotu (krok 1.8 stopnia) to dołączony do sterownika mikrokrokowego potrzebuje już 2000 kroków. Pozwala to na zwiększenie płynności ruchu i komfortu obserwacji.
Zalecane wartości przekładni łącznej (iloczyn przekładni mechanicznej i przekładni elektrycznej montażu) powinny mieścić się w zakresie od 1296000 do 12960000 co oznacza dokładność sterowania od 1 do 0.1 sekundy łuku na 1 krok silnika. Optymalne warunki uzyskuje się dla wartości ok. 6480000 co oznacza krok sterowania rzędu 0.5 sek. Łuku. W takich warunkach dokładność prowadzenia i komfort obserwacji jest duży a jednocześnie przestawianie montażu z obiektu na obiekt jest jeszcze dość szybkie. Dla łącznych przełożeń o mniejszej wartości wzrasta szybkość ruchu montażu podczas przestawiania na nowy obiekt ale maleje dokładność prowadzenia objawiająca się pojawieniem się skoków obrazu. Dla większych przełożeń łącznych wzrasta czas jaki montaż potrzebuje na przestawienie się pomiędzy obiektami.
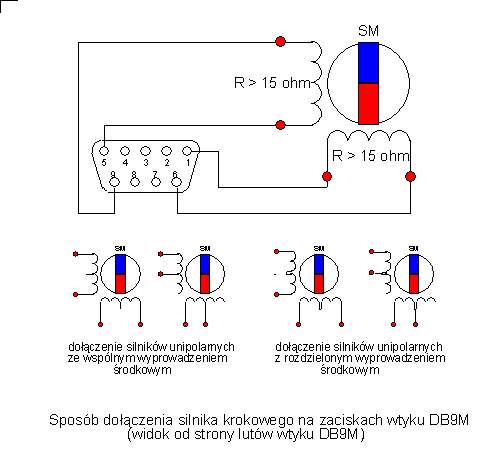
Zalecane do sterowania silniki krokowe powinny być typu bipolarnego (4 wyprowadzenia) o oporności uzwojeń nie mniejszych niż 15 omów. Dla mniejszych oporności silników mogą pojawić się dysfunkcje sterownika mikrokrokowego ze względu na ograniczenie maksymalnego prądu na 1 fazę rzędu 0.8-1A. Z tego punktu widzenia istotne jest również napięcie zasilania układu, które nie powinno z jednej strony przekraczać 18V ale z drugiej strony nie powinno być większe niż:
Uzas < Imax*Rs
gdzie: Uzas – maksymalne napięcie zasilania (nie większe niż 18V)
Imax – prąd maksymalny na fazę – należy przyjąć 0.8A
Rs – oporność czynna uzwojenia fazowego silnika
Dla przykładu, jeśli silnik będzie miał oporność fazy 150 omów to nawet przy maksymalnym napięciu zasilania 18V prąd nie będzie większy niż 18V/150 = 0.36A. Natomiast jeśli silnik będzie miał oporność 20 omów to maksymalne napięcie zasilania powinno być mniejsze niż 0.8A*20ohm=16V.
Silnik należy podłączyć do gniazd wyjściowych sterownika oznaczonych Azymut i Wysokość. Gniazdo opisane jako Azymut służy do podłączenia silnika osi Ra lub osi Az natomiast gniazdo Wysokość służy do podłączenia silnika osi De lub Wysokości.
Do prawidłowej pracy montażu niezbędne jest aby silniki obracały się zgodnie z pewnym zaprogramowanym systemem, który najłatwiej sprawdzić podczas pracy ręcznej (sterownik + AstroPilot). Należy kierować się tu zasadą, że podczas wymuszenia ruchu montażu za pomocą klawisza kierunku (->) montaż powinien poruszać się zgodnie z ruchem sfery niebieskiej a więc z prawa na lewo (dla obu typów montażu) natomiast podczas wymuszenia ruchu w kierunku strzałki skierowanej w górę (^) montaż powinien obracać się w kierunku większych deklinacji lub wysokości. O ile, dla którejkolwiek z osi stwierdzony zostanie ruch niezgodny z opisanym założeniem to należy zmienić na gnieździe silnika miejscami końcówki jednej z faz silnika. Podobny efekt można uzyskać obracając jedną z końcówek silnika o 180 stopni wewnątrz sterownika mikrokrokowego.
Nawigacja po ekranie procesora sygnału .
Do poruszania się po menu PS służą klawisze na AstroPilocie. W większości przypadków klawisz (<-) służy do zmiany położenia kursora a klawisze strzałki w górę i w dół służą do zmiany wartości na wybranej pozycji menu. Dodatkowo, klawisz strzałki w dół służy do wyboru wybranej pozycji menu o ile nie ma na tej pozycji menu zmiany wartości. Do oznaczenia aktywnej pozycji menu służy kursor w formie podkreślenia na dole ekranu.
Skuteczna praca goto możliwa jest jeśli na AstroPilocie wybrany jest tryb 0. Tryb ten można wybrać na AstroPilocie w dowolnym momencie przed przejściem do pracy goto przez przewinięcie klawiszem środkowym (czerwony) i zatwierdzenie klawiszem (->) lub użycie jednoczesne klawiszy żółtego i czerwonego (patrz instrukcja obsługi AstroPilota).
Procedura inicjująca pracę.
Po włączeniu zasilania na ekranie procesora sygnału (PS) pojawiają się komunikaty powitalne prowadzące do pojawienia się głównego menu urządzenia. Podczas procedur inicjujących następuje odczytanie z pamięci nieulotnej ostatnio wprowadzonych danych, które pojawiają się na ekranie podczas procedury inicjującej:
-
czasu rzeczywistego,
-
położenia geograficznego obserwacji
-
parametrów montażu.
W trakcie tej procedury wyliczane są podstawowe wielkości parametrów na jakich działa później algorytm urządzenia.
Główne menu programu zawiera 3 pozycje:
BEGIN (skrót od begin) – prowadzący do sterowania goto
OBJE (skrót od object) prowadzący do wyboru i edycji bazy danych o obiektach
SETU (skrót od setup) prowadzący do ustawień inicjujących

Procedura SETU
Procedura ta służy do ustawienia czasu, położenia geograficznego obserwacji oraz parametrów montażu. W celu wyboru tej opcji należy za pomocą klawisza (<-) przesunąć kursor na pozycję SETU i zatwierdzić ją klawiszem strzałki w dół. Procedura setup zawiera szereg następujących po sobie ekranów umożliwiających ustawienie najwyżej dwóch parametrów na jednym ekranie.
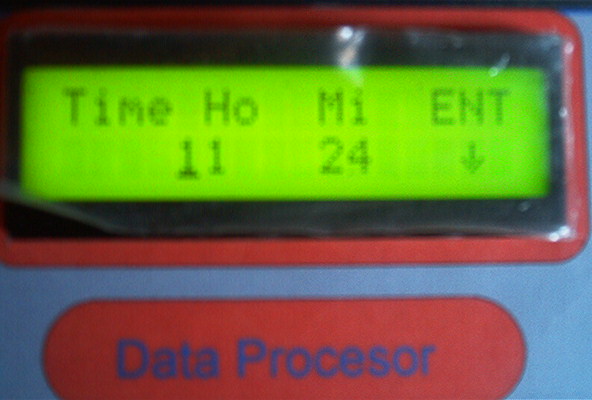
Pierwszy ekran pozwala na ustawienie czasu. Czas w procesorze odmierzany jest przez specjalizowany układ sterowany rezonatorem kwarcowym. Zaleca się kontrolę ustawienia czasu co kilka, kilkanaście dni. Czas należy ustawiać bez uwzględnienia czasu letniego. Oznacza to, że w okresie obowiązywania czasu letniego ustawiona godzina powinna różnić się od godziny czasu letniego o –1, czyli dla obserwacji o godzinie 22 zegar procesora powinien wskazywać godzinę 21. Pozycja Ho odpowiada godzinie, pozycja Mi odpowiada minucie, pozycja ENT służy to zatwierdzenia ustawień na całym ekranie a więc obu pozycji Ho i Mi. W celu ustawienia godziny należy za pomocą klawisza (<-) przesunąc kursor pod wartość leżącą pod oznakowaniem Ho i za pomocą strzałek kierunkowych w górę i w dół należy ustawić odpowiednią godzinę. Następnie używając klawisza (<-) należy kursor ustawić pod wartość leżącą pod oznakowaniem Mi i podobnie, za pomocą klawiszy strzałek w górę i w dół należy ustawić właściwą minutę. W każdej chwili możliwa jest korekta ustawień przez przesunięcia kursora pod odpowiednią pozycję i jej zmianę. Jeśli ustawienia czasu są właściwe należy zatwierdzić dane przesuwając kursor na pozycję symbolu graficznego strzałki w dół a następnie należy użyć klawisza strzałki w dół w celu zatwierdzenia tego ekranu (ustawionych wartości).
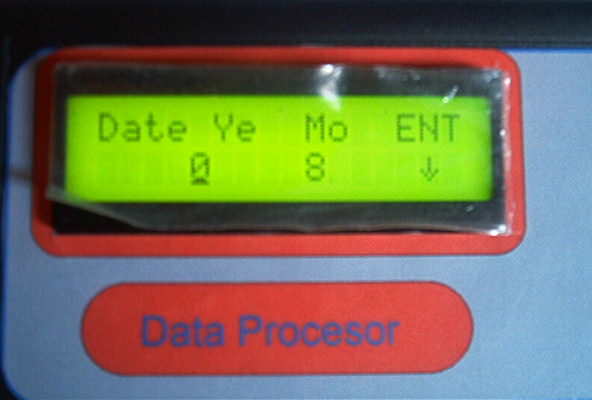
Drugi ekran setup umożliwia ustawienie właściwego roku oraz miesiąca. Zakres zmian dla zmiennej Ye (Year-rok) wynosi 0, 1, 2 i 3 i należy się tu kierować zasadą, że 0 wpisuje się dla lat przestępnych a 1, 2 i 3 dla lat kolejnych czyli dla roku 2005 należy wybrać wartość 1. Zatwierdzenie ustawień odbywa się po ustawieniu kursora na symbolu strzałki i użyciu przycisku strzałki w dół w AstroPilocie.
Kolejny ekran pozwala na ustawienie dnia miesiąca (Da) oraz typu montażu (Ty). Dla montaży paralaktycznych należy ustawić wartość Ty na 0 a dla montaży azymutalnych należy ustawić wartość Ty na 1. Zatwierdzenie danych odbywa się na pozycji strzałki oraz klawisza strzałki w dół na AstroPilocie

Następne ustawienia dotyczą położenia geograficznego obserwacji. Zmienna oznakowana jako Lo pozwala na ustawienie długości geograficznej a zmienna De dotyczy szerokości geograficznej. Zmiana wartości odbywa się z krokiem 0.05 stopnia. Przed wprowadzeniem danych należy współrzędne obserwacji zmienić na wartość dziesiętną według formuły:
wartość dziesiętna = szerokość w stopniach + szerokość w minutach/60 + szerokość w sekundach/3600
i zaokrąglając z dokładnością 0.05. Dla przykładu jeśli długość geograficzna obserwacji wynosi 20 stopni 31 minut i 23 sekundy długości zachodniej to po zamianie na wartość dziesiętną wyniesie: 20+31/60+23/3600=20.5231 czyli w sterowniku należy ustawić wartość Lo = 20.50.

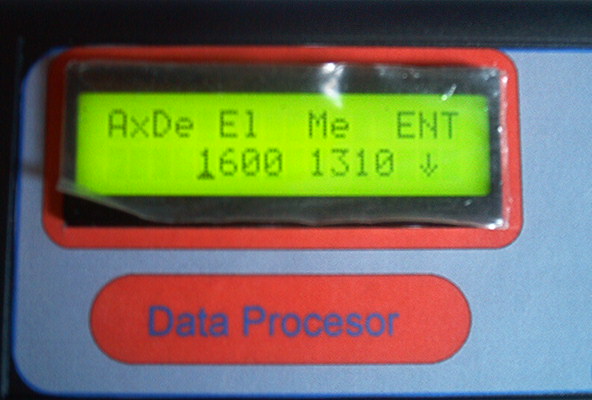
Kolejne ustawienia dotyczą przekładni montażu dla każdej z osi oddzielnie z podziałem na część elektryczną przekładni i część mechaniczną przekładni. Pierwszy z ekranów dotyczy osi Ra lub Az (AxAz). Parametr E1 oznacza przekładnię elektryczną dla tej osi a parametr Me oznacza przekładnię mechaniczna dla tej osi. Wypadkowe przełożenie w osi Ra (lub Az) jest iloczynem obu wartości więc równoznaczne są ustawienia El=1000 i Me=1000 - czyli łącznie 1000000 z ustawieniami El=500 oraz Me=2000. Ponieważ w systemie sterowania użyty jest sterownik mikrokrokowy z podziałem podstawowego kroku na 10 to przekładnia elektryczna El silnika jest zwiększona 10 krotnie i wynosi 10*360/krok silnika. Dla przykładu, jeśli użyty zostanie silnik z krokiem 1.8 stopnia to wartość przekładni elektrycznej dla niego wyniesie: 10*360/1.8=2000.

Podobnie ustawia się parametry przekładni elektrycznej i mechanicznej dla drugiej osi teleskopu czyli w zależności od typu montażu dla osi deklinacji lub wysokości. Zatwierdzenie ustawień odbywa się po ustawieniu kursora na pozycji strzałki i przez użycie klawisza strzałki w dół na AstroPilocie.
Wszystkie ustawione dane zostają wpisane do pamięci na trwałe po wykonaniu całego cyklu setup-u. Ponowna korekta dowolnego parametru wymaga wykonania całego cyklu ustawień. Ustawień początkowych dokonuje się każdorazowo, jeśli nastąpiła zmiana miejsca obserwacji, zmiana parametrów montażu lub wymagana jest zmiana czasu. Jeśli w dłuższym okresie czasu nie zmieniane są podstawowe parametry miejsca i montaży należy wyłącznie kontrololować aby czas procesora nie różnił się od czasu oficjalnego o więcej niż kilka minut .
Po wykonaniu ustawień system wraca na główny poziom menu.
Procedura OBJE
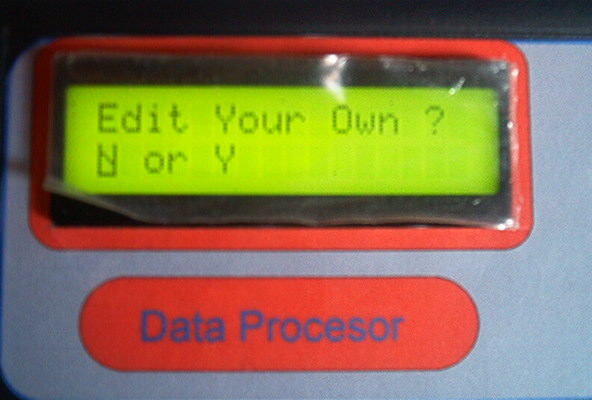
Procedura ta pozwala na wybór obiektu obserwacji lub modyfikację własnej bazy danych o obiektach. Po wybraniu tej procedury system pooczątkowo pyta czy ma być wykonana modyfikacja własnej bazy danych.
Domyśla odpowiedź sugeruje wybór opcji N (nie) za pomocą klawisza strzałki w dół na AstroPilocie co umożliwia przejście do wyboru obiektów z istniejących, stałych baz danych.
Obiekt może być wybrany z jednej z 4 baz danych:
-
STA - bazy najjaśniejszych gwiazd nieba północnego (ponad 80 obiektów ),
-
M - bazy obiektów Messier (110 obiektów ) ,
-
NGC - bazy obiektów IC i NGC (ponad 400) ,
-
OWN - z własnej bazy danych dla 10 obiektów.
Wybór bazy odbywa się przez ustawienie kursora pod nazwą bazy danych za pomocą klawisza strzałki (<-) i zatwierdzenie wyboru za pomocą strzałki w dół.

Po wyborze odpowiedniej bazy na ekranie pojawi się pierwszy z obiektów w każdej bazie opisany nazwą i współrzędnymi Ra i Dec wyrażonymi w godzinach (parametr Ra w zakresie 0-23.99 godzin) i stopniach (parametr Dec w zakresie –90 - +90 stopni) w systemie dziesiętnym.
Obiekty w bazach STA, M i NGC są ułożone alfabetycznie, a w bazie OWN w kolejności wprowadzenia. Zmianę obiektu do obserwacji umożliwiają klawisze strzałek w górę i w dół na AstroPilocie a zatwierdzenie wybranego obiektu następuje przez użycie klawisza strzałki (<-). Po zatwierdzeniu obiektu system wraca do głównego poziomu menu.




Jeśli na pytanie o edycję własnej bazy obiektów zostanie udzielona odpowiedź Y (Yes) wtedy otwiera się okno edycji własnej bazy danych. Własna baza danych ma pojemność 10 obiektów.
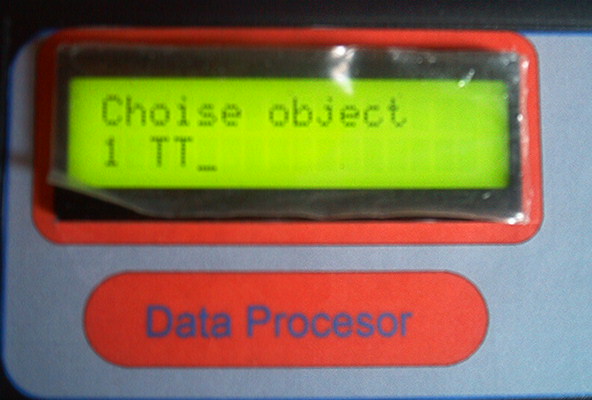
Początkowy ekran edycji pozwala na wybór obiektu podlegającemu edycji. Przewijanie odbywa się za pomocą klawisza strzałki w dół , wybór za pomocą strzałki (<-) . Numer wybranego obiektu pokazany jest z lewej strony dolnego wiersza a obok jego nazwa.
Po wyborze obiektu do edycji otwiera się okno edycji jego nazwy. Nazwa może liczyć do 4 znaków. Zmiana edytowanej pozycji nazwy wykonywana jest za pomocą klawisza (<-) a jego wartość (0-0, A-Z) zmieniana jest za pomocą klawiszy strzałek w górę i w dół. Uzycie klawisza (<-) na ostaniej pozycji edytowanej nazwy zamyka edycję nazwy obiektu umożliwiając edycję parametrów tego obiektu.
Jeśli została ustalona nazwa własnego obiektu to system przechodzi do procedury określenia jego parametrów Ra i Dec w zapisie dziesiętnym .
Kursor można przemieszczać pomiędzy współrzędną Ra i Dec za pomocą klawisza (<-) a zmianę wartości konkretnej współrzędnej umożliwiają klawisze strzałek w górę i w dół. Zatwierdzenie ustalonych wartości współrzędnych odbywa się po ustawieniu kursora na symbolu strzałki i zatwierdzeniu klawiszem strzałki w dół. Współrzędne obiektu należy podawać w systemie dziesiętnym zamieniając dane wyrażone w godzinach, minutach i sekundach oraz w stopniach, minutach i sekundach na godziny i stopnie wyrażone w systemie dziesiętnym. Dla przykładu, jeśli współrzędne obiektu wynoszą Ra = 23 godziny 15 minut i 23 sekundy oraz Dec =47 stopni, 46 minut oraz 18 sekund to należy wprowadzić dane: Ra = 23 + 15/60 + 23/3600 = 23.26 oraz De = 47 + 46/60 + 18/3600 = 47.77. Zatwierdzenie danych odbywa się na pozycji sybolu strzałki z użyciem klawisza strzałki w dól na AstroPilocie a system wraca do głównego poziomu menu.
Procedura BEGI
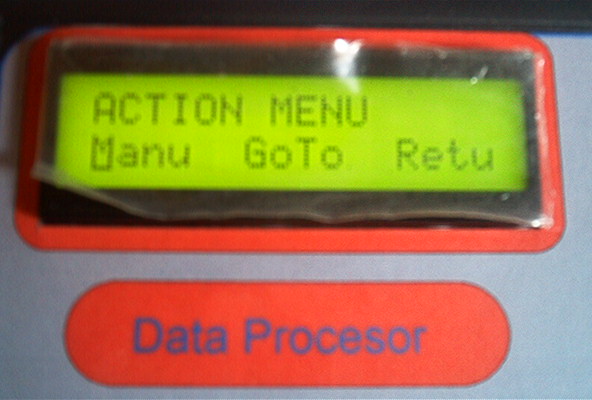
Procedura ta jest główną procedurą systemu pozwalająca na śledzenie i wyszukiwanie obiektów a także na pracę ręczną i ręczną korektę położenia obiektów w trakcie śledzenia.
W tym trybie do wyboru jest możliwa praca manualna za pomocą AstroPilota (Manu) lub praca goto (GoTo). Powrót do głównego menu umożliwia opcja Retu (Return). Wybór opcji odbywa się za pomocą klawisza strzałki (<-) a zatwierdzenie wybranej opcji za pomocą strzałki w dół na AstroPilocie.
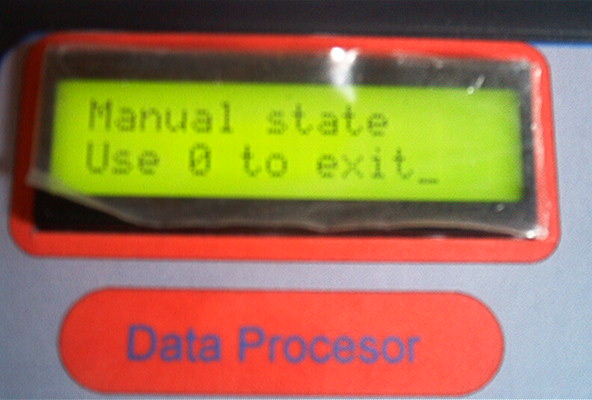
Wybór opcji pracy manualnej pozwala na kontrolę montażu w obu jego osiach za pomocą klawiszy kierunkowych AstroPilota. W tym trybie możliwa jest klasyczna praca z 5 prędkościami (tryby 1-5 AstroPilota) a powrót do ACTION MENU możliwy jest po wybraniu na AstroPilocie trybu 0 przez przewinięcie środkowym klawiszem (czerownym) i zatwierdzenie klawiszem (->) lub jednoczesne użycie klawisza żółtego i czerwonego).
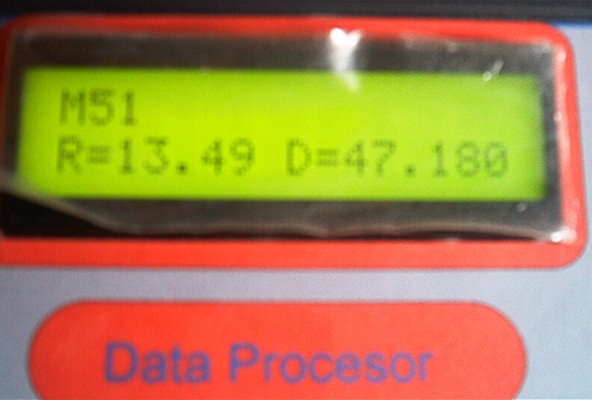
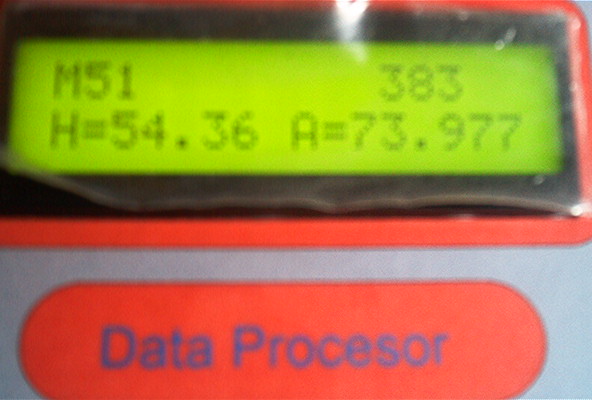
Praca goto możliwa jest pod warunkiem, że AstroPilot ustawiony jest w trybie 0. Wybór trybu goto powoduje, że system zaczyna sterować montażem śledząc ostatnio wybrany obiekt w jednej z baz danych. Na ekranie pojawia się nazwa wybranego wcześniej obiektu oraz jego parametry lokalne H (wysokość w stopniach nad horyzontem) oraz A (azymut liczony od południka lokalnego). Wartości te zmieniają się w czasie a równolegle do pojawiających się zmian system generuje na wyjściu impulsy sterujące silnikami w obu osiach montażu. Jeśli współrzędna H osiąga wartość zerową system przestaje sterować montażem (obiekt znika pod horyzontem). Podobnie, jeśli wybrany obiekt ma w danej chwili współrzędną H mniejszą od zera to system nie generuje żadnych impulsów sterujących. W trybie goto w linii nazwy wybranego do sterownia obiektu pojawia się stojąca z prawej strony liczba wyrażająca w setkach ilość impulsów sterujących jakie ma w danej chwili do wykonania system (suma dla obu osi) aby montaż nadążył za obiektem. W stanie śledzenia wartość ta wynosi przeciętnie 0 lub 1.

Jeśli montaż ma wykonać funkcję goto to należy wybrać inny obiekt z dostępnych baz danych. Umożliwia to klawisz strzałki w dół na AstroPilocie otwierający menu opisanej wcześniej procedury wyboru obiektu z istniejących baz danych. Bazę danych wybiera się ustawiając kursor za pomocą klawisza (<-) i zatwierdzając klawiszem strzałki w dół na AstroPilocie.
Po wyborze bazy danych z obiektami należy za pomocą klawiszy strzałek w górę i w dół na AstroPilocie wybrać żądany obiekt do sterowania. Na pokazanym rysunku tym obiektem jest M51. Zatwierdzenie wyboru dokonywane jest klawiszem (<-)
Po dokonaniu wyboru obiektu system przestawia montaż do nowego położenia określonego współrzędnymi lokalnymi H i A co sygnalizowane jest także liczbą impulsów do wykonania w obu osiach łącznie. Na pokazanym rysunku trwa właśnie przestawianie montażu na obiekt M51 a montaż ma jeszcze do przebycia 383*100=38300 kroków silników w obu osiach licząc łącznie.
Korekta położenia obiektu w okularze podczas śledzenia obiektu
Podczas pracy goto możliwa jest ręczna korekta (za pomocą AstroPilota) położenia obiektu w okularze teleskopu. W tym celu należy podczas działania opcji goto nacisnąć na AstroPilocie klawisz (<-). Sterowanie zatrzymuje się z komunikatem o pracy w trybie Manual.
W tym stanie możliwa jest ręczna korekta położenia obiektu w klasycznych trybach pracy ręcznej AstroPilota (tryby 1-5). Powrót do pracy goto dla ostatnio wybranego obiektu jest możliwy po ponownym wyborze na AstroPilocie trybu 0 (przez standardowe przewinięcie menu klawiszem środkowym i zatwierdzenie klawiszem (->) lub przez jednoczesne użycie klawisza żółtego i czerwonego).
Awaryje opuszczenie trybu goto
Awaryjne opuszczenie trybu goto możliwe jest jeśli na AstroPilocie wybrany zostanie jeden z trybów pracy ręcznej 1-5 lub użyty zostanie żółty klawisz AstroPilota. System wraca wtedy na poziom głównego menu.
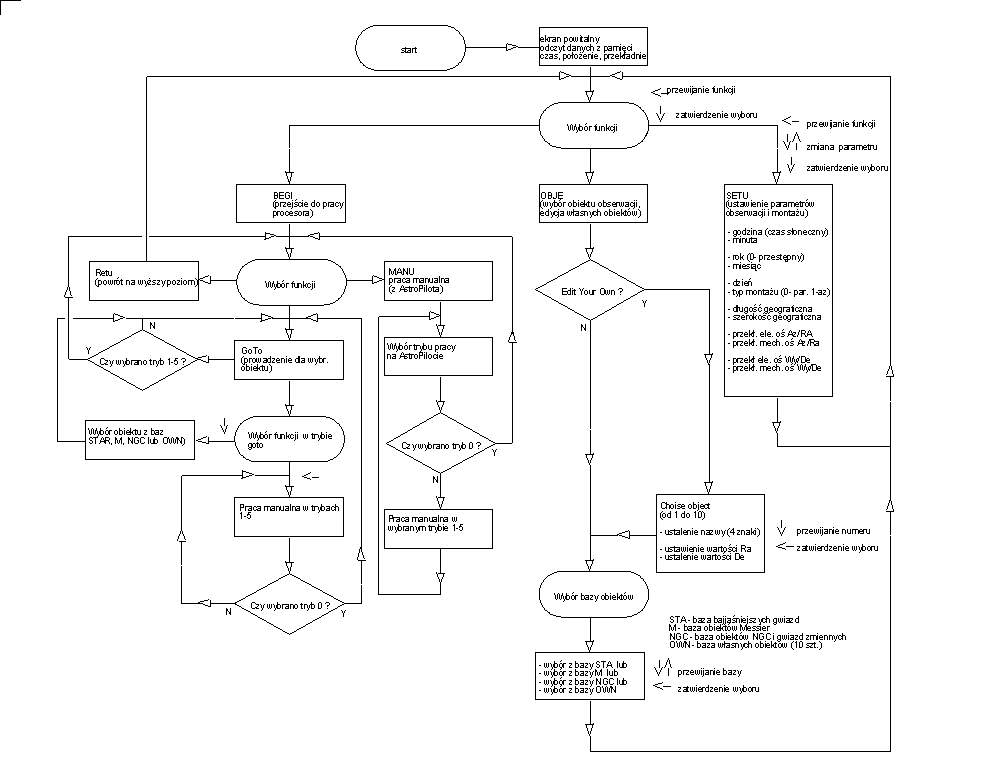
Graf stanów systemu sterowania