PROCESOR SYGNAŁU v.3
Nowa wersja (v3.0) procesora sygnału prawie całkowicie zastępuje komputer PC do sterowania napędem teleskopu. Układ jest kompatybilny ze sterownikiem silników krokowych systemu goto pl i może działać równolegle z AstroPilotem lub całkowicie bez AstroPilota.
Układ zawiera bazę ok. 600 obiektów (w tym wszystkie M i ponad 80 najjaśniejszych gwiazd), pozwala na dowolne ustawienie parametrów montażu (rodzaj montażu i wielkości przekładni dla każdej z osi), umożliwia też ustawienie parametrów miejsca obserwacji (długość i szerokość geograficzną).
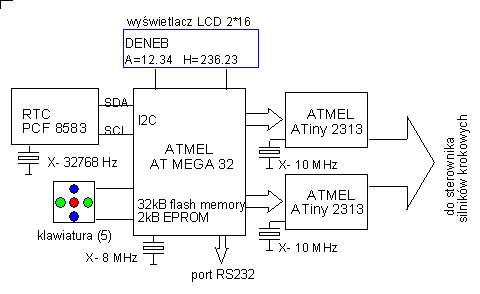
Sercem procesora sygnału jest mikrokontroler AT MEGA 32 (32kB pamięci flash) z zegarem 8MHz. Układ zawiera wyświetlacz LCD 2*16 znaków, zegar czasu rzeczywistego z podtrzymaniem bateryjnym, klawiaturę 5 przyciskową oraz 2 gniazda RJ45 dla podłączeń zewnętrznych
Całe urządzenie mieści się w obudowie 125/95/25mm a przednia strona chroniona jest ozdobną maskownicą.

Konstrukcja mechaniczna wykorzystuje typową obudowę mieszczącą główną płutkę drukowaną stanowiącą wspornik także dla dodatkowej płytki drukowanej dla klawiatury. Taka konstrukcja wynika z konieczności odsadzenia klawiszy od powierzchni głownej płytki drukowanej po ty by klawisze wystawały na odpowiednią wysokość ponad obudowę.
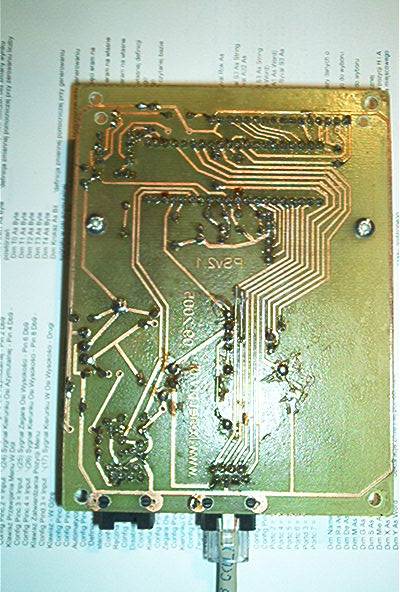
Procesor sygnału może być wykonany w 2 wersjach: w wersji podstawowej (jak na zdjęciu) nie zawiera ukladu normalizacji sygnału (2 dodatkowe mikrokontrolery ATiny 2313) oraz w wersji rozbudowanej z ukladami normalizacji sygnału. Wersja podstawowa może współpracować bezpośrednio ze sterownikiem silników krokowych zawierającym już układy normalizacyjne i automatykę przełączającą. Wersja rozbudowana zalecana jest w przypadkach użycia własnych sterowników silników krokowych. W wersji rozbudowanej uklady do normalizacji znajdują się w wolnym polu płytki drukowanej z lewej strony klawiatury.

Do podłączeń zewnętrznych służą dwa gniazda RJ45. Jedno z nich zapewnia połączenie ze sterownikiem silników krokowych a drugie jest portem RS do przyszłych zastosowań (głownie do konfiguracji za pomocą komputera PC)
Wyświetlacz LCD 2*16 znaków wspiera się na łączówce sygnałowej oraz na 2 gwintowanych tulejkach 10mm.
Stałą pracę zegara czasu rzeczywistego zapewnia potrzymanie bateryjne z baterii 3V używanej w sprzęcie PC. U dołu procesora, po jego prawej stronie widoczny jest także brzęczyk współdziałający z klawiaturą.
Przybliżony koszt wykonania urządzenia to: procesor ATMEGA 32 (25PLN), wyświetlacz LCD (32PLN), zegar RTC (9PLN), obudowa (4.5), bateria (5.5PLN), rezonatory kwarcowe (1.5+2=3.5PLN), gniazda RJ45 (2*3.5=7PLN), inne (stabilizator, tranzystory, oporniki i kondensatory, elementy mechaniczne, w tym płytki drukowane, - razem ok. 16PLN) co w sumie daje ok. 105 PLN. W wersji rozbudowanej o normalizator sygnału należy doliczyć jeszcze 2 uklady ATiny 2313 za ok. 20 PLN.

Nowy procesor sygnału zbudowany jest podobnie do swojego pierwowzoru, posiada jednak kilka dodatkowych funkcji ale przede wszystkim może działać samodzielnie z dowolnym sterownikiem silników krokowych mającym wejścia sterujące kierunku i zegarna na poziomie TTL (0-5V).
Zestaw wszystkich rysunków można znaleźć w pliku word-a
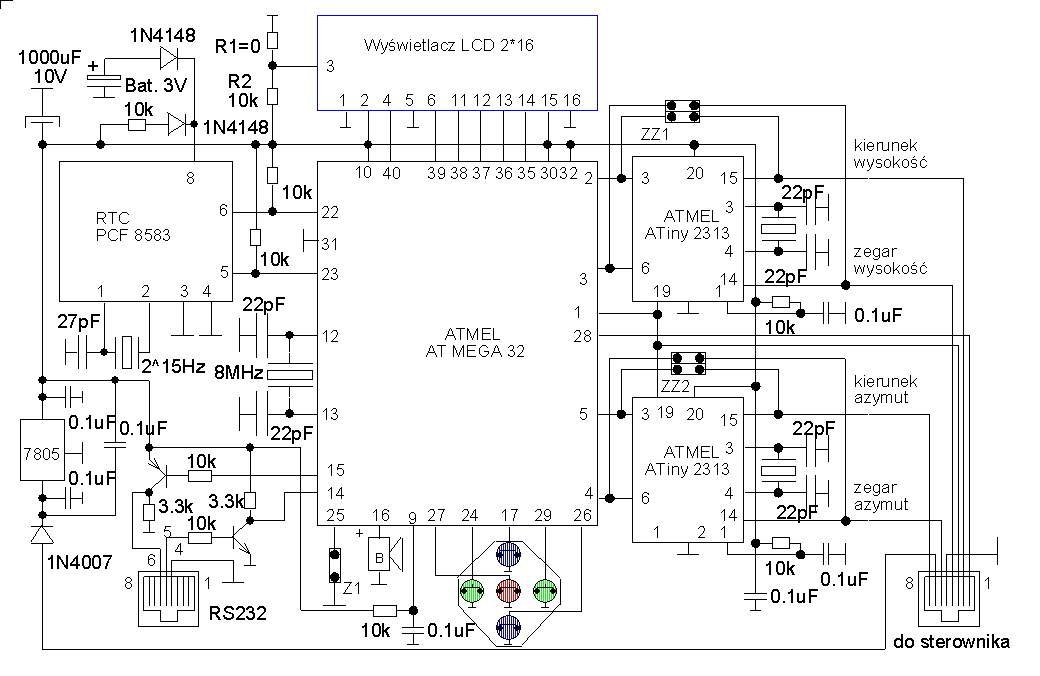
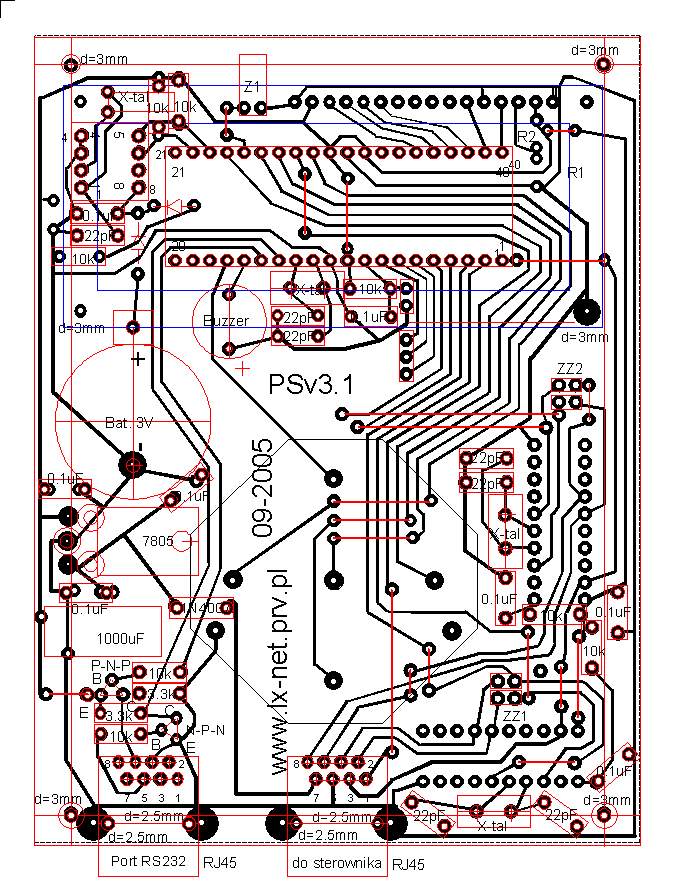
Na schemacie na uwagę zasługują dwa elementy:
zwory ZZ1 i ZZ2 pozwalają na wykonanie procesora bez układów normalizacji sygnału w przypadku współpracy ze sterownikami mającymi już takie układy. W takiej sytuacji nie montuje się elementów związanych z procesorami ATiny 2313 ani samych procesorów a tylko zakłada się zwory ZZ1 i ZZ2,
sygnał na styku 1 gniazda RJ45 może być wejściem lub wyjściem. Jeśli procesor pracuje w trybie master to styk ten jest wyjściem na którym utrzymywany jest stale poziom logiczny 0. W trybie slave styk ten jest wejściem sterowanym sygnałem goto/manual pochodzącym z AstroPilota. Praca procesora sygnału jako goto możliwa jest po wyborze w AstroPilocie trybu 0 (odpowiada to poziomowi 0 na pinie 1 gniazda RJ45).
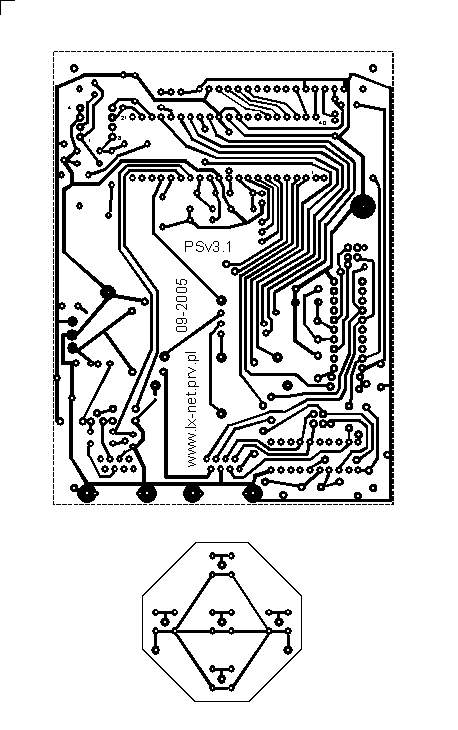
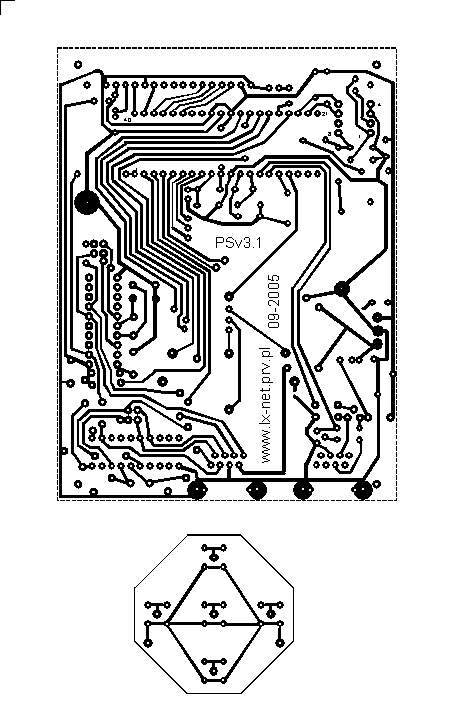
Montaż urządzenia należy rozpocząć od wykonania płytek drukowanych i wszystkich otworów, w tym do mocowania w obudowie (4 otwory 3mm), do mocowania wsporników wyświetlacza (2 otwory 3mm) oraz do mocowania gniazd RJ45 (4 otwory 2.5mm). Następnie należy wykonać wszystkie zwory zaznaczone na rysunku na czerwono.
W następnej kolejności należy zmontować płytkę wspierającą klawisze, którą wlutowuje się na przewodach o średnicy 0.8-1mm w taki sposób aby jej odległość od płytki głównej wynosiła 4-6mm.
Układ zmontowany poprawnie powinien startować samodzielnie bez problemów.
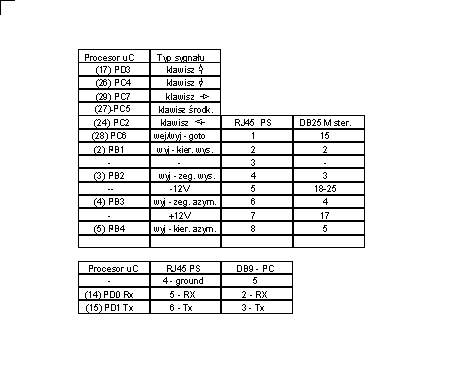
Tabele podają opis sygnałów na poszczególnych gniazdach procesora sygnału. Stanowią zarazem opis kabli połączeniowych jakie są potrzebne do połączenia procesora ze sterownikiem silników krokowych oraz z portem RS232 PC.
Wszystkie rysunki znajdują się w pliku word-a