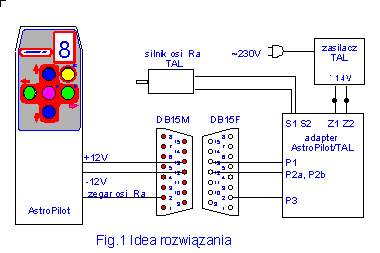
AstroPilot może współpracować z napędem teleskopu TAL. Wykorzystuje się w tym przypadku sygnał zegara osi Ra/Az, który dostarcza impulsów sterujących dla silnika synchronicznego mechanizmu zegarowego teleskopu TAL. Silnik zegara teleskopu TAL musi być zasilany napięciem zmiennym ok. 16V o częstotliwości 50Hz. Astropilot wytwarza częstotliwość 50Hz, która poddawana jest wzmocnieniu we wzmacniaczu AstroPilot/TAL. W efekcie silnik synchroniczny mechanizmu napędowego teleskopu TAL zasilany jest kwarcowo stabilizowanym napięciem ok. 16V/50Hz a AstroPilot pozwala na wykorzystanie przy sterowaniu prawie wszystkich swoich zaawansowanych funkcji.
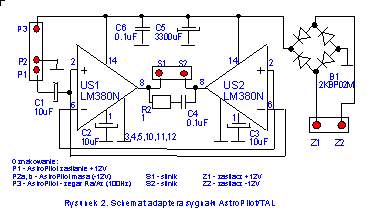
Wzmacniacz sygnału AstroPilot/TAL zawiera wzmacniacz w układzie mostka na układach US2 i US3 sterowany wprost sygnałem z AstroPilota. W efekcie silnik napędu zasilany jest napięciem 16V/50Hz.
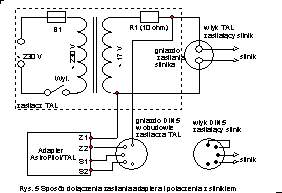
Złącze P (P1-3) służy do połączenia z AstroPilotem, złącze S (S1-2) zasila silnik napędu a złącze Z (Z1-2) jest połączone z transformatorem zasilacza silnika TAL-a.
Opis AstroPilota, jego funkcji, programowania oraz instrukcję montażu znajdziesz w sekcji dotyczącej AstroPilota.
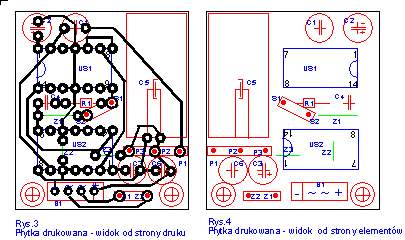
Montaż wzmacniacza należy rozpocząć od wykonania zwor Z1-2 zaznaczonych na zielono. Następnie należy wlutować układy scalone i pozostałe elementy. Połączenia z gniazdem pilota, silnikiem oraz gniazdem zasilania można wykonać w sposób trwały przez bezpośrednie wlutowanie przewodów lub za pomocą szpilek lutowniczych oraz rozłączalnych wtyków. Prawidłowo zmontowany układ nie wymaga regulacji i działa od razu. Przed uruchomieniem należy upewnić się czy elementy zostały wlutowane prawidłowo jeśli chodzi o wyprowadzenia i polaryzację.
Układ wzmacniacza sygnału z AstroPilota zasilany jest z zasilacza TAL-a. Na rysunku 5 pokazany został schemat tego zasilacza oraz sposób dołączenia wzmacniacza do zasilacza. Sam wzmacniacz umocowany został wkrętami wewnątrz zasilacza na dwóch wspornikach izolacyjnych a gniazda połączenia z AstroPilotem (P) oraz połączenia z silnikiem (Z) osadzone zostały w obudowie zasilacza po lekkim powiększeniu istniejących w niej naturalnych otworów.
Ze względu na moc wydzielającą się w układach scalonych US1 i US2 zaleca się przyklejenie do ich obudów radiatorów z blachy o powierzchni od kilku do kilkunastu centymetrów kwadratowych.
Dla prawidłowej pracy monytażu AstroPilot powinien wytwarzać na wyjściu zegarowym Ra/Az częstotliwość 50Hz co wymaga zaprogramowania go na odpowiednią wartość. Dla AstroPilota z rezonatorem 10MHz należy zaprogramować wartość: '0 50000' oraz ustawić zworę na pozycji 2 natomiast AstroPilot z rezonatorem 8MHz należy ustawić na wartość: '0 40000' oraz także zworę na pozycji 2.
System sterowania z AstroPilotem pozwala na wykorzystanie większości funkcji w nim zaprogramowanych (poza ruchem wstecznym) oraz pozwala na pracę w terenie poprzez możliwość zasilania z akumulatora. (12V/0.5A)
Ponieważ montaże Uniwersal z zegarem w osi Ra posiadają także silniki synchroniczne 24V/50Hz zatem powyższe rozwiązanie można przenieść wprost na te montaże.
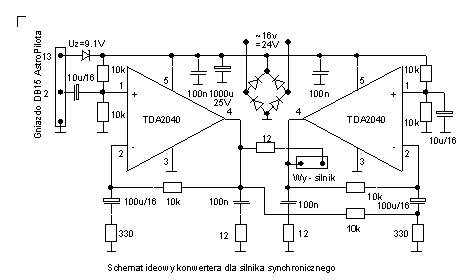
Sterownik z układami LM380 ma ograniczenia związane z mocą, które można ominąć używając innych wzmacniaczy zintegrowanych. Szczególnie dobrze spisuje się tu układ TDA2040, który jest bardzo dobrze skompensowany wewnętrznie, ma wbudowane systemy przciążeniowe i pracuje w szerszym zakresie mocy nić LM380. Para układów TDA2040 znakomicie nadaje się do zasilania silników synchronicznych na napięcie 24V.
W układzie użyta została też dioda zenera 9.1V ograniczjąca napięcie zasilania dla AstroPilota. Jeśli układ nie będzie pracował przy napięciu wyższym niż 15V to należy zamiast tej diowy wlutować zworę.
Zasady użycia konwertera na układach TDA2040 są identyczne do opisanych dla LM380.
Przy montażu ukłądu trzeba pamiętać, że użyte kondensatory elektrolityczne powinny być na napięcie 16V a główny kondensator filtrujący 1000uF nawet na napięcie 25V.
Uklad może być zasilany z transformatora sieciowego o napięciu do 16V (wartość skuteczna) lub z akumulatora 24V. Działający na wejściu zasilania mostek (50V/1A) sprawia, że biegunowość przy zasilaniu z akumulatora jest dowolna.
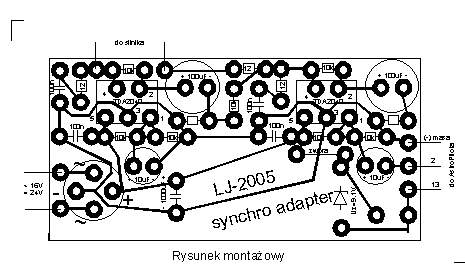
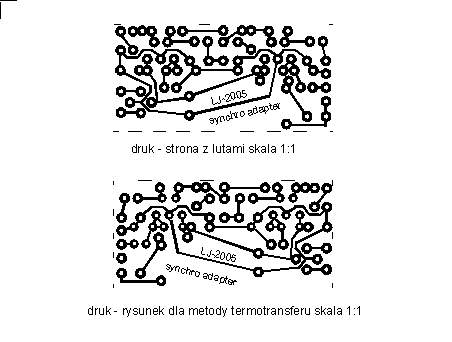
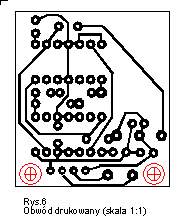
Pokazane rysunki to grafika w skali 1:1. W szczególności drugi z rysunków nadaje się do bezpośredniego zastosowania w wykonywaniu płytki drukowanej metodą termotransferową.
Całość pokazanej dokumentacji dla układu TDA2040 można pobrać również w pliku word-a.