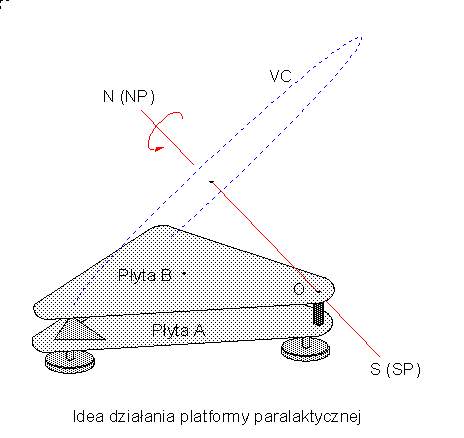
Platforma paralaktyczna pozwala na długotrwałe prowadzenie teleskopu azymutalnego (kilkadziesiąt minut) z dokładnością wystarczającą do obserwacji wizualnych i pomimo tego, że technicznie mozliwe jest dokładniejsze prowadzenie to głównie ze względu na problematycze ustawienie platformy z żądaną dokładnością w przestrzeni a także ze względu na błędy poboczne (np. brak znajomości charakterystyki geometrycznej platformy i geometrii stojącego na niej teleskopu) trudno jest uzyskać dokładność prowadzenia wystarczającą do długoczasowej rejestracji fotograficznej. Z pomocą może tu przyjść system guide pozwalający na precyzyjne śledzenie w dwóch wzajemnie prostopadłych osiach ruchu obiektu w okularze teleskopu.
Sterowanie platformą w dwóch osiach wymaga takiego sterowania jej ruchem aby uzyskać w teleskopie wzajemnie prostopadły ruch obiektu podczas realizacji sterowania dla każdej osi. Istotą zadania jest dobranie takiego poruszania platformą aby osiągnąć taką własnie prostopadłość ruchu jaka jest oczywista w przypadku montażu paralaktycznego.
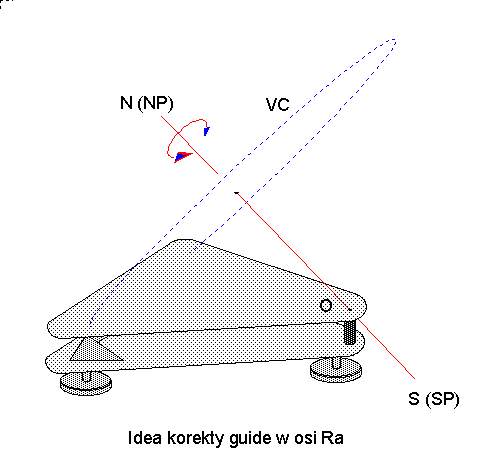
Z zasady działania platformy (podobnie jak montażu paralaktycznym) wynika, ze sterowanie w osi Ra możliwe jest w sposób naturalny przez przyspieszenie lub spowolnienie prędkości silnika napędzającego platformę co jest stosunkowo łatwe do osiągnięcia przez prostą modyfikację działającego ukladu napędowego. Obecnie platforma napędzana jest przez silnik krokowy i zintegrowany sterownik stanowiący połączenie sterownika mikrokrokowego i AstroPilota.
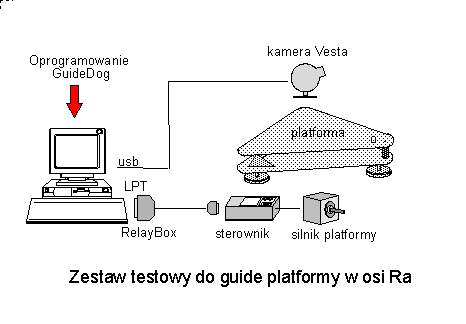
Sterowanie nadążne w osi Ra zrealizowana zostało przez modyfikację programu sterownika oraz wyprowadzenie dodatkowego złącza do połączenia z PC. Procedurę guide realizuje oprogramowanie GuideDog działające w taki sposób, że wytwarza na porcie LPT komputera cztery binarne sygnały (czyli typu 0 lub 1) sterujące w zależności od zarejestrowanego błędu prowadzenia. Sygnały te to A+ i A- dla jednej osi oraz B+ i B- dla drugiej osi. Obie osie są do siebie wzajemnie prostopadłe ale dla sterowania w jednej osi sygnały dla drugiej osi są oczywiście nieistotne. System sterowania guide dla jednej osi wymaga oczywiście kamery rozpoznawanej przez oprogramowanie GuideDog oraz
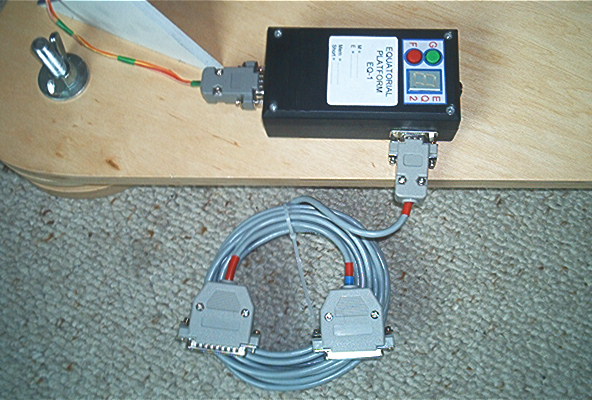
Dodatkowym elementem działającym w testowanym ukladzie jest tzw. RelayBox czyli układ sprzęgający komputer ze sterownikiem wyposażony często w przekaźniki mechaniczne. W tym rozwiązaniu RelayBox składa się tylko z optoizolatora umieszczonego w obudowie wtyku do PC.
Pokazany na zdjęciu sterownik platformy ma wyprowadzone dodatkowe gniazdo sterowania a kabel sterujący ma dwa złącza od strony PC: jedno z nich to wtyk DB25 podłączany do portu LPT komputera a drugie to gniazdo DB25 umożliwiające podłączenie w razie potrzeby sterowania kamerą guide lub aparatem fotograficznym.
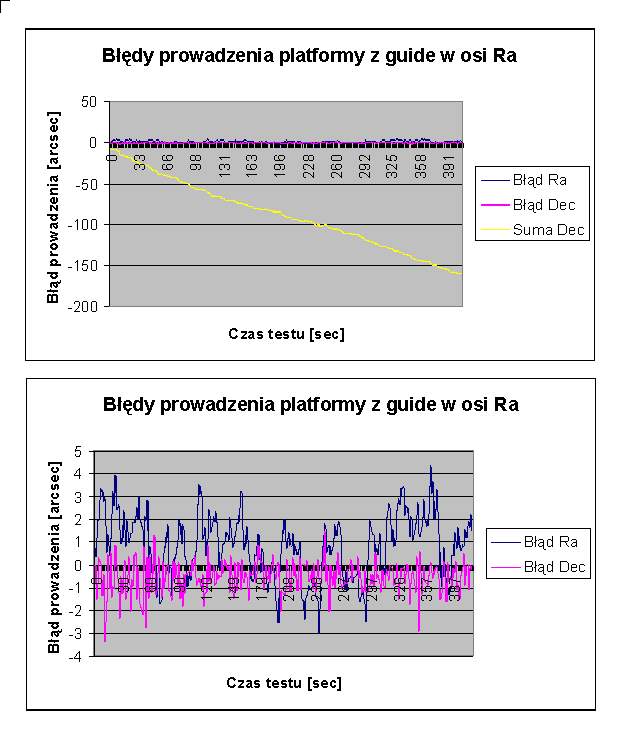
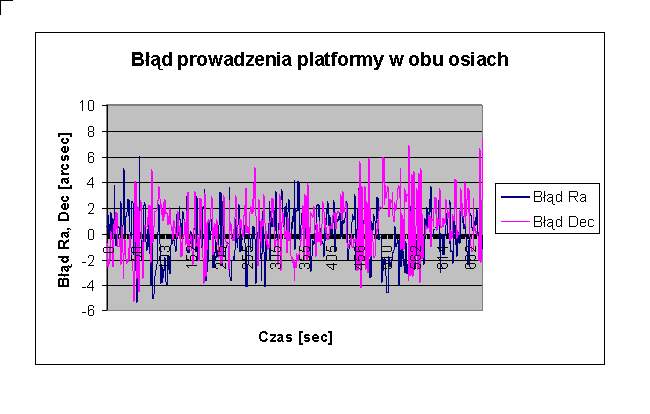
Efekty działania sterowania w jednej osi bardzo dobrze odzwierciedla log sterowania programu Guide Dog. Przykładowy log zawiera 4 kolumny oznaczające kolejno: datę, godzinę zdarzenia, błąd w osi Ra i błąd w osi Dec.
Log ten można zobrazować na wykresie gdzie wyraźnie widać w jaki sposób sterowanie w jednej osi poprawia działanie platformy. Pierwszy z wykresów pokazuje błędy prowadzenia zarówno dla osi Ra (kolor niebieski) jak i dla osi Dec (kolor żółty). Dodatkowo, w kolorze czerownym pokazane zostały chwilowe błędy prowadzenia dla osi Dec, które kumulowały się w czasie powodując oddalenie platformy od celu w osi Dec do wartości ponad 150 arcsec w czasie ok 400 sek. trwania testu. Błąd dla osi Ra nie przekroczył na końcu testu wartości skuteczniej 1.63arcsec co oznacza skuteczne prowadzenie dla tej osi w zakresie od -1.63 arcsec do +1.63arcsec. Obserwując błąd chwilowy dla osi Dec można powiedzieć, że gdyby tylko był on niwelowany na bieżąco to działania platformy mogłoby być równie dobre i dla osi Dec.
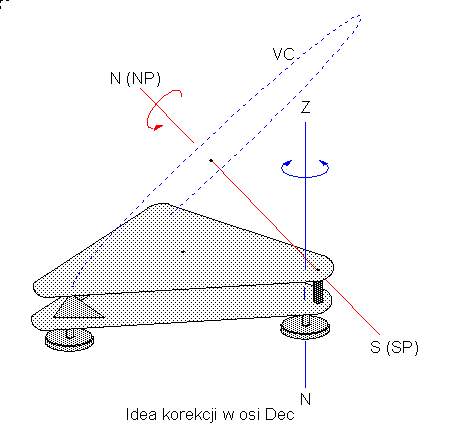
Idea sterowania platformą w drugiej osi wynika z procedury ustawiania platformy na biegun północny. Okazuje się, że korektę ustawienia platformy w osi Dec osiąga się obracając platformę wokół osi pionowej pokazanej na rysunku jako N-Z.
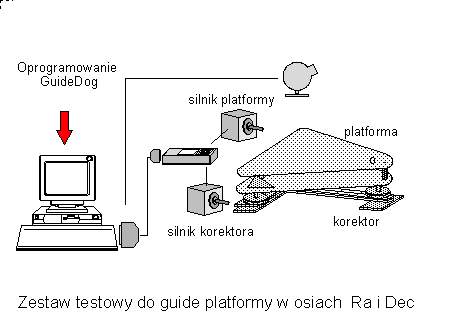
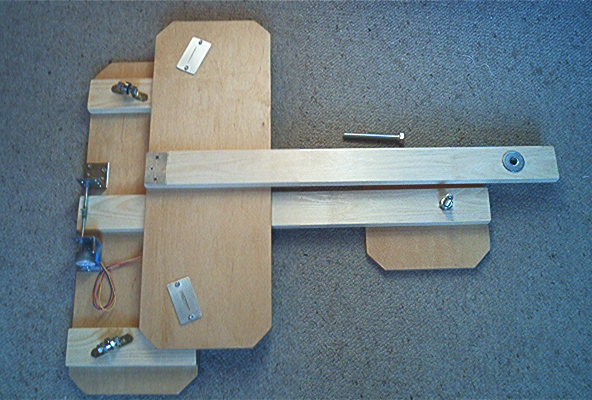
Układ testowy sterowania platformą w obu osiach pokazany został na kolejnym rysunku gdzie sterowanie odbywa się za pomocą dwóch silników: jednego służącego do napędu platformy i drugiego działającego w dodatkowym urządzeniu, które nazwałem korekorem drugiej osi lub krótko korektorem.
Działanie sterowania w obu osiach potwierdza słuszność wykonanego rozwiązania co można stwierdzić między innymi analizując log programu GuideDog. Dla tego logu został wykonany wykres błędów dla obu osi w funkcji czasu. Czas testu wynosił ponad 10 minut w czasie których wykonane zostało zdjęcie za pomocą aparatu Canon 350 z obiektywem 135mm (zestawienie 5 klatek po 120 sek. każda). Skuteczna wartość błędu dla wyniosła dla osi Ra 1.9 arcsec a dla osi Dec 2.2 arcsec.
{kind=link}
Korektor drugiej osi zbudowany został jako element, na którym stawia się platformę. Wysokość korektora wynosi ok. 10cm co co dla mniejszych teleskopów oznacza korzystne dla nich zwiększenie wysokości ale dla teleskopów o dużej ogniskowej wymaga dodatkowego szczebla na drabince :-)
Korektor składa się z nieruchomej podstawy oraz ruchomej bazy, na której stawia się teleskop. Korektor należy ustawić na możliwie płaskim i poziomym miejscu. Po ustawieniu na korektorze platformy należy zorientować ją w przestrzeni w typowy sposób dbając o możliwie dobre ustawienie co 'zdejmie' trochę pracy systemowi korekcji.


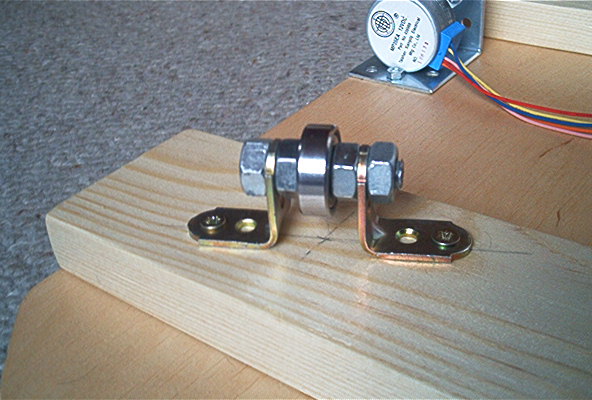
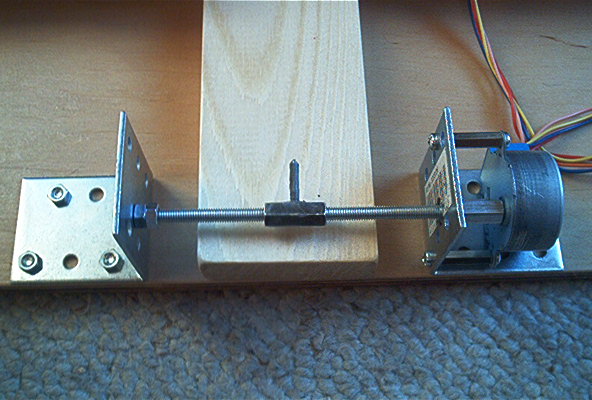
Platforma napędzana jest przez silnik typu MP35A (7.5 stopnia oraz przekładnia 1:85), który obraca śrubę M5 z wydłużoną nakrętką sześciokątną, w której zamocowany został sztyft napędzający górną, ruchomą część platformy. Ponieważ ruchy korekcyjne dla osi Dec nie zą z reguły zbyt wielkie i ograniczają się w praktyce do kilkunastu a najwyżej kilkudziesięciu sekund łuku to do prawidłowej pracy urządzenia wystarczają zwykłe luzy jakie powstały przy montażu napędu. Całkowity zakres ruchu korektora wynosi +-2 stopnie i w tym zakresie napęd nie wykazuje żadnych zacięć i oporów. Ponieważ jednak w systemie isteniją luzy to do ich kasowania została użyta sprężyna rozpięta poprzecznie pomiędzy górną a dolną częścią korektora.
Drugie zdjęcie pokazuje widok ruchomej części korektora, w której znajduje się metalowa płytka z otworem, w który wchodzi sztyft napędzający. Z boku widać miejsce mocowania sprężyny kasującej luzy w systemie.

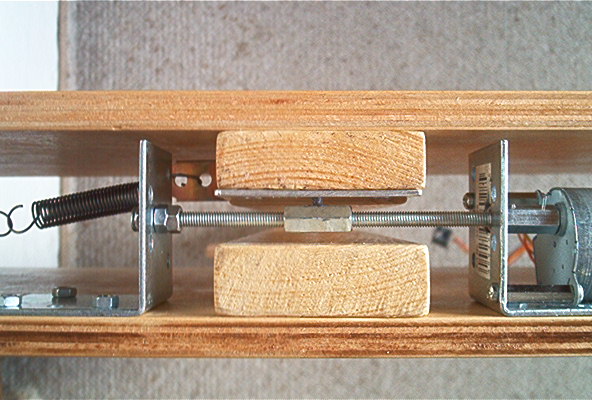
Ruchoma część korektora spoczywa od strony północnej na dwóch łożyskach podpierających platformę dokładnie pod stopami północnymi. Podparcie platfromy od strony południowej zapewnia wspomiana wcześciej śruba ustalająca wzajemne położenie obu części korektora. Ponieważ na korektorze spoczywa cały ciężar platformy z teleskopem dlatego w miejscu styku łożyska z ruchomą częścią korektora należy użyć metalowej podkładki.