Pora na podsumowanie:
- podstawowa szerokość geograficzna użytkowania: 51 stopni z tolerancją poprawnej pracy dla co najmniej +- 2 stopni w obu kierunkach (nie testowano w szerszym zakresie)
- czas pracy platformy: max. 75 minut
- zasilanie 12-18V / 0.4-0.6A
- nośność do 30 kg
- waga całkowita 12 kg (4.5 kg płyta ruchoma i 7.5 kg podstawa z napędem)
- Prowadzenie przy obserwacjach wizualnych - bardzo dobre w całym zakresie ruchu dla największych powiększeń teleskopu (do ok. 500 razy)
- Prowadzenie przy astrofotografii jest jeszcze trakcie testów ale jest na pewno wystarczające dla długotrwałych naświetleń urządzeniami z krótkimi ogniskowymi.

Plany na przyszłość, co poprawię w następnej platformie:
Podstawowym elementem , który można poprawić jest kształat platformy oraz ilość wsporników. Nie ma potrzeby aby platforma miała kształt pełnego prostokąta zarówno dla podstawy jak i płyty ruchomej. Również ilość wsporników (regulowanych stóp) można ograniczyć do 3 usuwając czwarty wspornik od strony południowej a trzeci przesuwając na środek. Na pokazanym rysunku widać w jaki sposób można zmniejszyć wymiary platformy bez degradacji żadnej z jej elementów funkcjonalnych.
Rysunek polazuje sugerowany docelowy kształat platformy - obie płyty będa miały kształt tójkata. Można je obie wyciąć z prostokątnego kawałka sklejki 15mm o rozmiarach ok. 70/72cm. Taki kształt platformy oznacza zmniejszenie ciężaru płyt prawie o 50% a całej platformy o ok. 40%. Prawdopodobnie też stopy regulacyjne wykonam również jako okregi o średnicy 100mm więc będą sie one całkowicie chować w zarysie platformy.
Rysunek dotyczy sugestii dla obu płyt z tym, że w płycie dolnej powinny się znaleźć otwory pod stopy (B) oraz otwór na trzpień łożyska południowego (A-12mm) oraz otwór na śrubę skręcającaą obie płyty do transportu (C) . W płycie górnej musi się znaleźć otwór na gniazdo łożyska południowego (A-22mm) oraz otwór C na oś łożyskującą teleskop. Kolorem niebieskim zaznaczone są miejsca gdzie na płycie górnej trzeba rozmieścić ślizgowe podkładki teflonowe (ok. 200mm od punktu C rozmieszczone co 120 stopni). Kolorem czerwonym zaznaczyłem obrys ruchomej podstawy teleskopu Synta (średnica 500mm). Na szerszej części obu płyt zamontowane zostaną elementy łożyskowania północnego i napędu ale ponieważ w tym zakresie nie ma żadnych zmian obowiązywać będą pokazane już wcześniej rysunki projektowe.
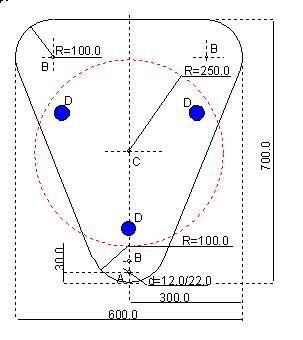
W skrajnym przypadku platforma składać się może z prostego szkieletu wykonanego z aluminium w kształcie podpartej litery T a nawet litery samej litery T (w tym ostatnim przypadku mocowanie teleskopu na platformie przesunięte jest w znaczący sposób wstronę pólnocną co obciąża dodatkowo system łożyskowania północnego.
Przez zmianę kształtu platformy zyskuje się na jej wadze i mobilności. Należy jednak zadbać aby redukując wymiary obu płyt platformy lub zmieniając ich kształt zachować wymaganą sztywność odpowiedzialną za przeniesienie ciężaru współpracującego teleskopu.
Na rysunku czerwonym kolorem zarysowany został owal rzutu podstawy teleskopu a kolorowe punkty czerwone i niebieskie znaczą miejsca gdzie wykonane zostanie łożyskowanie teleskopu i gdzie trzeba umieścić teflonowe podkładki slizgowe.
