Końcowe prace przy platformie polegały na uzupełnieniu jej o dodatkowe funkcje pomocnicze i związane z bieżącą eksploatacją.
Płyta dolna wyposażona została w kompas przyklejony do podstawy na osi północ południe. Ustawienie platformy z dokladnością kompasu wystarcza w większości przypadków na obserwacje wizualne z dużymi powiększeniami w zakresie pracy platformy czyli przez ok. 75 minut.
Zrezygnowałem z montowania na podstawie wskaźników poziomu uznając, że mała poziomnica będzie równie dobrze służyć do tego celu.
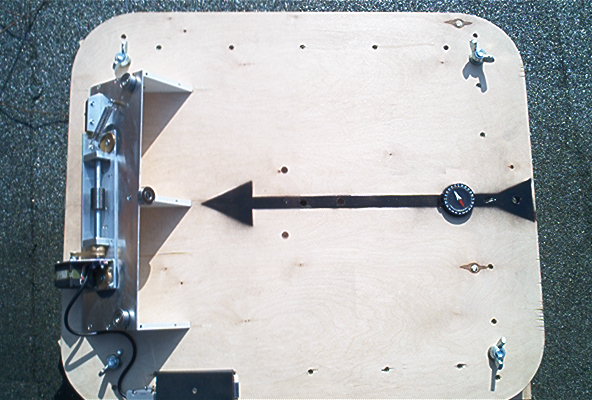
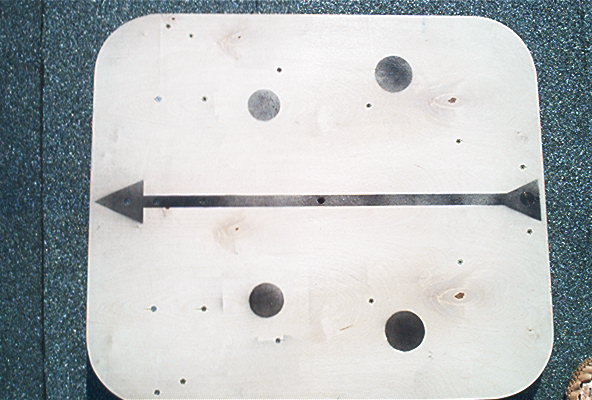
Na płycie ruchomej - górnej zrobiłem centralnie otwór (na osi namalowanej strzałki) na śrubę łożyskującą teleskop a zaznaczone okręgi wskazują na miejsca gdzie powinny znaleźć się teflonowe podkładki ślizgowe (rozstaw jak dla teleskopów Taurus w obu wersjach - trzeci punkt ślizgowy leży na linii strzałki po lewej stronie rysunku dla dużego teleskopu i po prawej stronie dla małego)
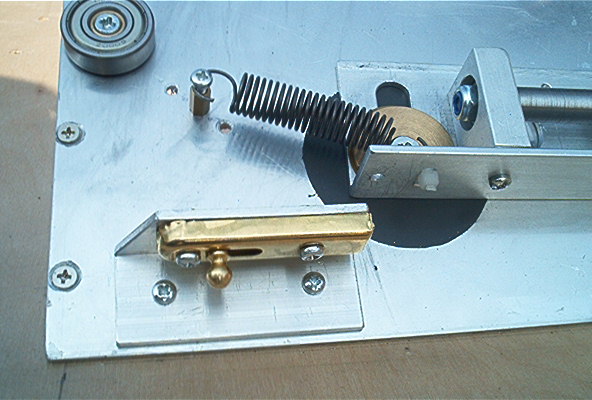
Dość ważną sprawą jest w mechaniźmie śrubowym sprzęgło pozwalające odłączyć mechanizm napędowy i przestawić platformę w położenie początkowe po przewinięciu się jej do końca. Zasada działania sprzęgła polega na odsunięciu i ustaleniu w tym położeniu mechanizmu napędowego na czas przewijania platformy.
Do tego celu użyta została prosta zasuwka meblowa zamocowana na prostokątnym wsporniku.
Na pokazanym zdjęciu widać, że zasuwka ustala na stałe położenie mechanizmu napędowego odsuniętego w dół od śruby napędowej.
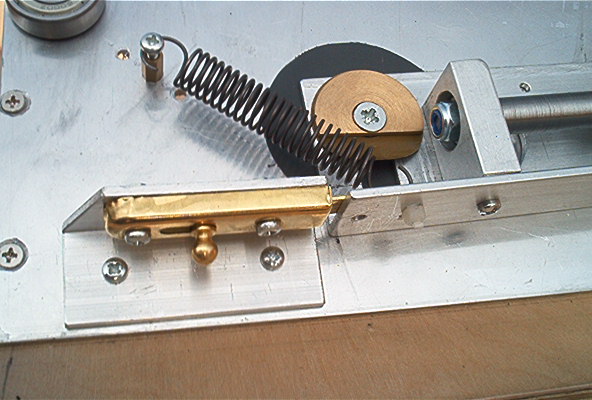
Tu z kolei widać, że mechanizm napędowy jest zwolniony i dzięki sprężynie dociskany jest do śruby napędowej.
Mechanizm sprzęgła pomocny jest również w tarkcie czynności manipulacyjnych z platformą takich jak montowanie na niej teleskopu oraz w trakcie transportu i zpobiega przypadkowemu uszkodzeniu śruby na kole napędowym lub w mechaniźmie napędowym.
Aby platforma stanowiła jedną całość wygodną do złożenia i transportu zastosowałem zespół pozwalający na wzajemne skręcenie ze soba obu części platformy za pomocą śruby przechodzącej centralnie przez obie płyty platformy. Dodatkowo, pomiędzy płytami znajduje się element dystansujący o wysokości 98mm w postaci odcinka rury PCV o średnicy 100mm.
W trakcie transportu obie płyty dociskane są więc do siebie dzięki śrubie a dodatkowo docisk ten jest ograniczany przez rurę dystansującą. W ten sposób obrys platformy złożonej ze skręconych obu płyt chroni elementy znajdujące się wewnątrz a więc głównie elementy systemu napędowego.

Środkowe łożysko podtrzymuje od spodu północne koło łożyskujące działając dokładnie pod kątem prostym do jego powierzchni
Testy wykazały, że takie łożyskowanie jest wystarczające nawet dla teleskopów do 30kg (Taurus 380mm).

Ostatnim elementem modyfikującym podstawową konstrukcję platformy jest nowy sterownik silnika krokowego pozwalający na zwiększenie dokładności pracy platformy 5 krotnie. Użycie sterowania mikrokrokowego z podziałem na 10 pozwoliło na znaczące zmniejszenie drgań platformy a co za tym idzie i obrazu. Testy wykazały, że obraz jest stabilny (brak wyczuwalnych drgań) przy powiekszeniach większych niż 500 razy w teleskopie Taurus.
Pokazany w link-u nowy sterownik wykonywany jest głównie z myślą o sterowaniu systemem goto w dwóch osiach. Do sterowania platformą użyta zostanie jego część - generator mikrokroków i wzmacniacz mostkowy jednego kanału - umożliwiająca pracę z jednym silnikiem w trybach półkrokowym i z podziałem kroku na 10 mikrokroków.