Praktyczna realizacja sterowania pokazanego na schemacie blokowym w opisie systemu sterowania dla Synty wykorzystuje technikę mikroprocesorową do generowania sygnału mikrokrokowego oraz do kontroli całego układu sterowania.
{kind=link}
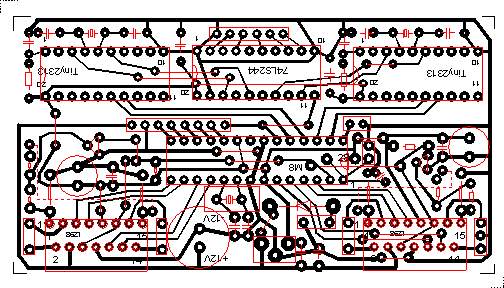
Schemat układu zawiera 2 mikroprocesory ATiny2313, jeden procesor ATMEGA 8 oraz 2 wzmacniacze mostkowe L298. Dodatkowo, w układzie pracuje bufor 74244 do połączenia z PC. Pokazany układ w połączeniu z AstroPilotem stanowi kompletny system sterowania współpracujący z programem goto. Do układu wystarczy dołączyć tylko silniki i można korzystać z dobrodziejstw automatycznego śledzenia oraz wyszukiwania (goto) obiektów dla montaży paralaktycznych i azymutalnych o praktycznie dowolnych przełożeniach .
{kind=link}
Układ ten wykonany w części zaznaczonej na schemacie czerwoną przerywana linią jest jednokanałowym sterownikiem mikrokrokowym jaki może być wykorzystany do napędzania silnika krokowego platformy paralaktycznej lub koziołka z podwyższoną rozdzielczością sterowania..

Płytka układu posiada wyprowadzenie w postaci pin-ów do podłączenia gniazda AstroPilota, sterowania z PC, silników krokowych i zasilania. Układy mocy i stabilizator umieszczone są z jednej strony płytki co pozwala na ich łatwe dokręcenie do radiatora w przypadku, gdy zasilane silniki krokowe mają małą oporność uzwojeń oraz gdy napęcie zasilania jest znacznie większe od 5V.
{kind=link}
Na pokazanym zdjęciu układ znajduje się już w pozycji pionowej w plastykowej obudowie, w której dnie wykonany został otwór, przez który całość dokręcona jest do zewnętrznego radiatora z aluminium. Na bocznych ściankach obudowy widać z lewej strony gniazda DB9F do podłączenia 2 silników krokowych oraz z prawej strony gniazda DB15F dla podłączenia AstroPilota, DB25M do podłączenia do portu LPT oraz gniazdo zasilania zewnętrznego.
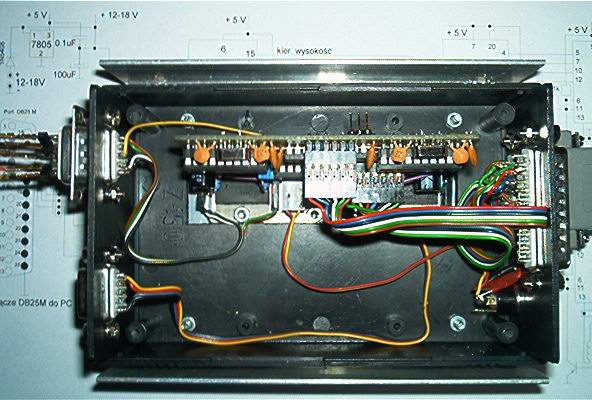
Obudowa to typowe pudełko 90/50/140mm a radiator wykonany jest z odcinka profilu aluminiowego tupu C 115/38/2mm o długości 140mm. Pudełko skręcone jest z radiatorem czterema wkrętami M3.

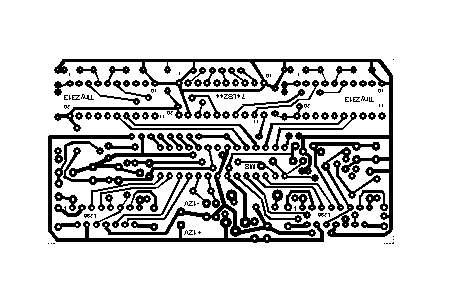
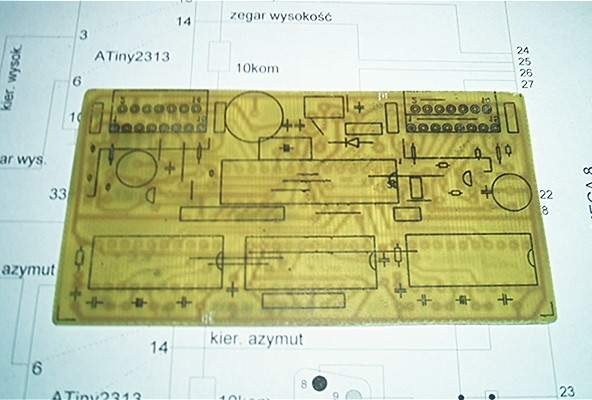
Komplet rysunków (schemat, rysunek druku w wymiarach naturalnych do użycia w metodzie termodruku laserowego oraz powiększony rysunek montażowy) można znależć w pliku druk1.doc


Podstawowe cechy i własności układu sterowania:
- pełna współpraca z AstroPilotem i programem goto pl
- praca z silnikami uni i bipolarnymi o oporności nie mniejszej niż 10 omów
- napięcie zasilania 6-18V
- sterowanie silnikami w trybach półkrokowym i mikrokrokowym (z podziałem na 10 mikrokroków) przełączane zworą
- zastosowanie w ukladach śledzenia montaży paralaktycznych, azymutalnych, platformie paralaktycznej, koziołku itp.
- liniowość mikrokroków nie gorsza niż 30%
- prędkość sterowania (zależna od użytego rezonatora kwarcowego w układzie AT Mega8) dla zegara 18MHz wynosi ok. 2200Hz (wypełnieniem 1:9) oraz ok. 10kHz (dla wypełnienia 1:1). Z zegarem 8MHz spada proporcjonalnie do 980Hz (dla wypełnienia 9:1) oraz 4.5kHz (dla wypełnienia 1:1).
- tryb mikrokrokowy oparty na PWM o rozdzielczości 1/10 i częstotliwości próbkowania kilkanaście kHz (zależnej od użytego rezonatora kwarcowego w układzie AT Mega 8).
