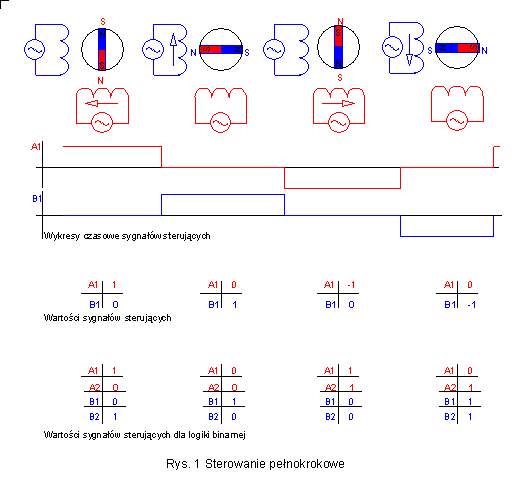
Najprostszy silnik krokowy składa się z dwóch uzwojeń na stojanie ułożonych pod kątem 180 stopni oraz magnetycznego wirnika.Jest to silnik bipolarny dwufazowy o kroku równym 90 stopni. Działanie silnika polega na takim ułożeniu się wirnika względem stojana, że działające na wirnik siły się równoważą. Sterowanie pełnokrokowe polega na pokazanej na rysunkach cyklicznej zmianie położenia biegunów magnetycznych na stojanie co wymusza ruch wirnika w kierunku minimalizacji siły zwrotnej działającej na wirnik. Stosując odpowiednio dobraną cykliczność zmian położenia biegunów magnetycznych na stojanie uzyskuje się wymagany ruch silnika w pożądanym kierunku.
Dla sterowania pełnokrokowego pobudza się kolejno uzwojenia w taki sposób, że bieguny magnetyczne na stojanie poruszają się po kole w cyklu 4 ruchów. Jest to bardzo istotne założenie bo wpływa na konstrukcję silników krokowych dwufazowych w których stojany wykonywane są zawsze z ilością biegunów będącą wielokrotnością liczby 4. Po wykonaniu 4 kroków silnik wraca do pozycji wyjściowej a w następnych ruchach silnika sekwencja sterująca powtarza się. Jeśli silnik ma nominalnie 200 kroków (1.8 stopnia/krok) oznacza to, że posiada 200/4=50 zespołów biegunów magnetycznych sterowanych po 4 kroki w jednym pełnym cyklu sterowania elektrycznego. Cykl 4 kroków sterujących prowadzących do powtórzenia sekwencji sterującej nazywa się krokiem elektrycznym silnika.
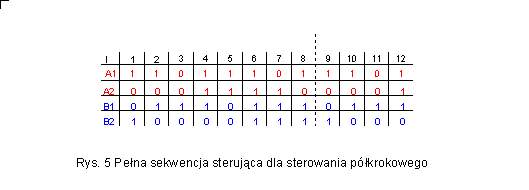
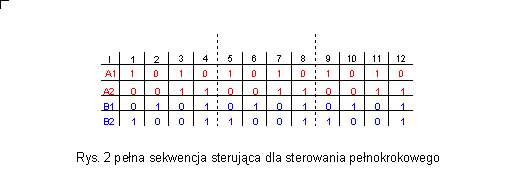
W tabeli wyliczone zostały sygnały sterujące jakie sa istotne dla prawidłowego działania silnika krokowego. Sekwencja sterowania powtarza się co 4 kroki. Ponieważ w ukladach sterowania wykorzystuje się logikę binarną to dla rozróżnienia czy dany sygnał zasilający uzwojenie (A1 lub B1) jest dodatni czy ujemny wprowadzone zostały znaczniki znaku obu sygnałów (A2 i B2). Jeśli znacznik A2 sygnału A1 ma wartość 1 to oznacza, że zasilanie uzwojenia A1 ma przeciwną polaryzację. Ruch silnika zgodnie z kierunkiem wskazówek zegara odbywa się po zastosowaniu sekwencji sterującej z narastającym I a więc dla kroków I =.....1,2,3,4,1,2,3,4,1 .... , zmiana kierunku odbywa sie przez zmianę sekwencji sterujacej co na przeciwną oznacza, że że sterowanie odbywaja się według reguły I =.....4,3,2,1,4,3,2,1,4.....,
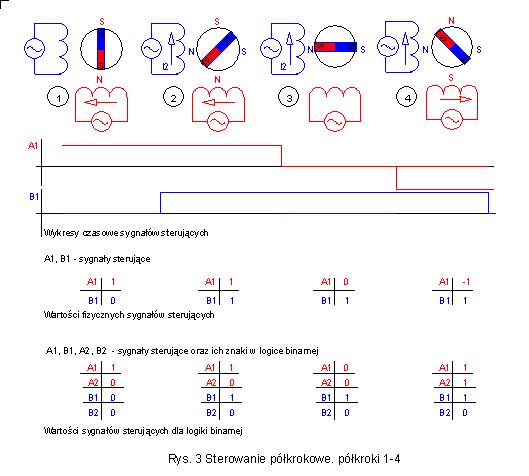
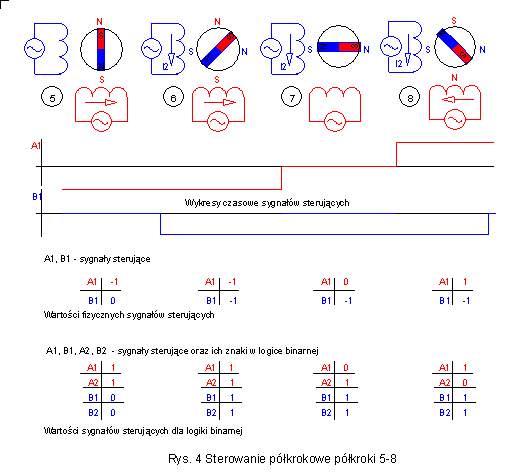
Prostym rozwinięciem idei sterowania pełnokrokowego jest sterowanie półkrokowe pozwalające na podwojenie rozdzielczości silnika. Wykorzystuje się przy tym sterowaniu fakt, że jeśli oba uzwojenia są zasilane równym prądem to położenie równowagi wirnika znajduje się dokładnie pomiędzy dwoma uzwojeniami jak na pokazanych rysunkach.