Algorytm sterownika silnika krokowego składa się z części umożliwiającej odczyt sygnałów sterujących silnikiem oraz z właściwej części wykonawczej zaznaczonej na rysunku pogrubioną ramką w kolorze niebieskim. W blokach oznaczonych na czerwono odbywa się czytanie odpowiednich wejść gdzie pojawiają się binarne sygnały sterowania (zegar) i kierunku ruchu dla danego kanału. Cały algorytm pracuje w zamkniętej pętli. Czynności pokazane nie związane z właściwym algorytmwm sterowania czyli w zasadzie wszystkie poza blokiem w kolorze niebisekim stanowią wtrącenie we własciwy algorytm sterowania PWM i powinny trwać możliwie krótko. Stąd istotne jest aby mikrokontroler realizujący algorytm działał z odpowiednio dużą prędkością. Do realizacji algorytmu można polecić procesory RISC np. produkcji ATMEL z serii AT MEGA.
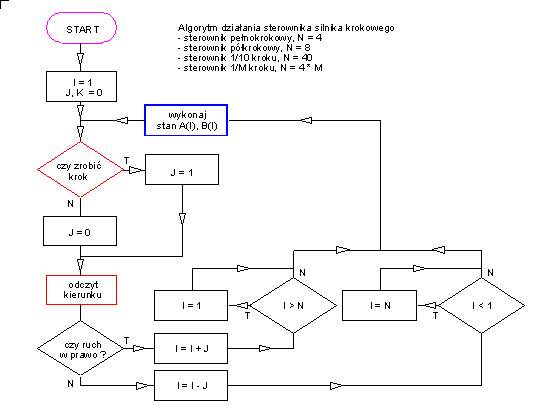
Właściwa część wykonawcza może realizować sterowanie pełne, półkrokowe lub mikrokrokowe. O ile dla dwóch pierwszych modów wystarczy oczyt i ustawienie odpowiednich wartości z tabel A1 i A2 o tyle dla sterowania mikrokrokowego należy wprowadzić dodatkowo modulację szerokości impulsu czyli PWM. Implementując w cały algorytm sterowanie mikrokrokowe można zrealizować także za pomocą PWM zarówno sterowanie pełnokrokowe jak i sterowanie półkrokowe. Dla pierwszego przypadku należy zmieniać wartość I co N kroków w drugim przypadku co N/2 kroków co oznacza, że dla sterowania pełno krokowego w algorytmie sterowania z podziałem kroku na 10 części (tabela A(I) o pojemności 40 elementów) należy do sterowania używać wartości A(1), A(11), A(21), A(31).
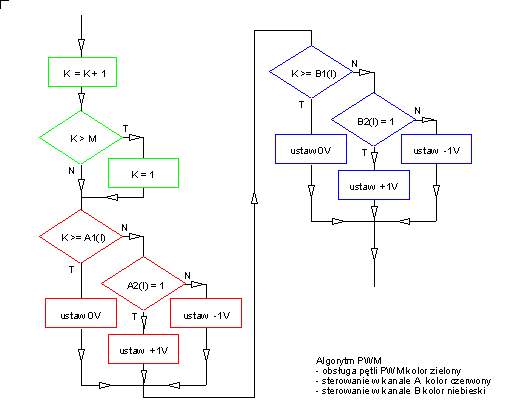
Sterowanie mikrokrokowe składa się z trzech części : części obsługującej działanie pętli PWM (kolor zielony) oraz z części obsługujących sterowanie poszczególnymi uzwojeniami silnika (kolory czerwony i niebieski). Sterowanie uzwojeniami jest identyczne. Dla ustalonej wartości pętli PWM (K) odczytywane są wartości z tabel A1 i B1 dla danego kroku sterowania I a więc A1(I) oraz B1(I) i o ile wartość K nie jest większa od A1(I) i B1(I) to na wyjściu uzyskuje się sterowanie pełnym prądem o znaku określonym w tabelach A2(I) i B2(I). Zmiany K powinny odbywać się znacznie szybciej niż zmiany I. Pełny cykl PWM obejmuje pętlę od 1 do M gdzie M wynosi np. 100. Dla innych wartości M należy przeliczyć proporcjonalnie wartości w tabelach A1 i B1.
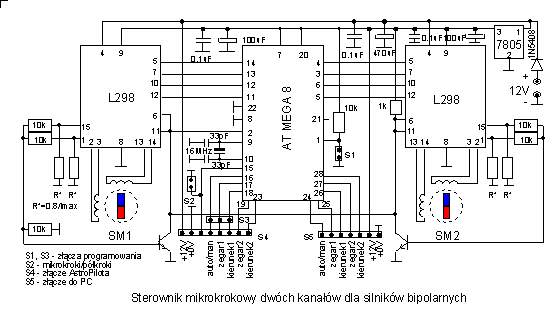
W układzie działa mikrokontroler AT Mega 8 posiadający odpowiednią ilość wejść niezbędną do zredukowania połączeń sterujących pomiędzy AstroPilotem PC oraz sterownikiem . Układ tem posiada pamięć programu 8k co pozwala na swobodne zapisanie niezbędnego kodu sterowania i tabelaryzację zmiennych A1, A2, B1 i B2. Zegar tego mikrokontrolera może działać z prędkością 16MHz co zapewnia właściwą szybkość sterowania dla najszybszych silników krokowych oraz pozwala na jednoczesną pracę dla dwóch silników krokowych (sterowanie jednoczesne niezależnymi dwoma kanałami w każdym z nich dla obu uzwojeń silnika krokowego).
Elementem wykonawczym bezpośrednio sterującym silnikami są układy mostków mocy L298 pozwalająca na prądy sterowania do 2A. W każdym z kanałów działa zabezpieczenie przciążeniowe sterowane napięciami z rezystorów R*.
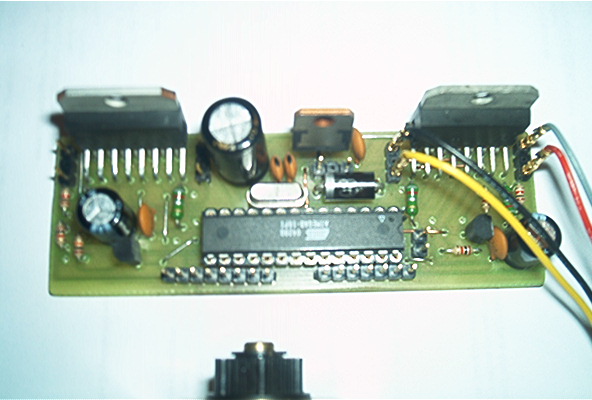
Schemat montażowy sterownika
Komplet rysunków (schemat, rysunek druku w wymiarach naturalnych do użycia w metodzie termodruku laserowego oraz powiększony rysunek montażowy) można znależć w pliku druk.doc
