Sterowanie zespołem napędowym teleskopu realizowane jest za pomocą systemu złożonego z części elektronicznej oraz oprogramowania sterującego tą elektroniką Sterowanie składa się zasadniczo z trzech elementów: AstroPilota, sterownika oraz oprogramowania sterującego gotopl działającego na komputerze PC. Opis systemu goto pl znaleźć można w innym miejscu tej strony. Opis AstroPilota w jego podstawowych zasadach opisałem w miejscu AstroPilot a najbardziej aktualną dokumentację (opis budowy i funkcji oraz instrukcję montażową) zawarłem w dokumentacji AstroPilota.
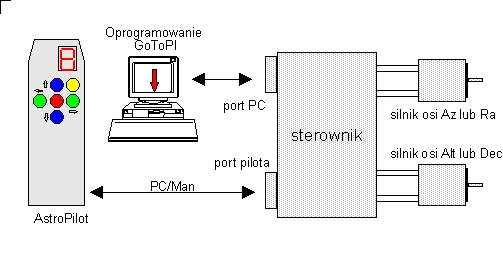
System sterowania w wersji podstawowej działa z pomocą programu gotopl (patrz też opis gotopl) pracującego na komputerze PC. Podstawową zasadę działania algorytmu tego oprogramowania pokazują grafy systemu. Sposób pracy sterowania określa AstroPilot pozwalający szybko przejść z trybu pracy ręcznej w tryb pracy automatycznej (śledzenie i goto) i odwrotnie.
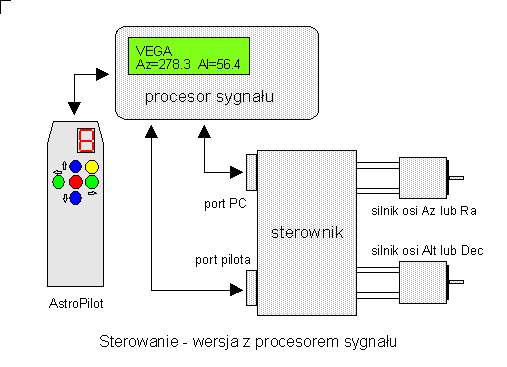
System sterowania z pomocą komputera PC wymaga jego obecności w pobliżu sterowanego montażu (sprawdzona na razie i przetestowana odległość do 10m). Zamiast komputera PC z oprogramowaniem gotopl można użyć procesora sygnału realizującego wyłącznie funkcje programu gotopl. Procesor sygnału zasilany może być z napięcia dostępnego w terenie (np. 12 z akumulatora samochodowego) co umożliwia łatwiejsze używanie systemu sterowania w warunkach polowych. Podstawową cechą stosowania procesora sygnału jest możliwość używania go bez żadnych zmian w istniejącej konfiguracji systemu sterowania. W dalszym ciągu w skład sterowania wchodzi AstroPilot i sterownik a zmienia się tylko sposób połączenia wzajemnego tych elementów.