Njabardziej istotną sprawą dla zrozumienia działania systemu goto jest zestaw sygnałów sterujących i ich źródeł. Z tego punktu widzenia najważniejszym elementem sterowania jest AstroPilot dostrczający sygnały zegara i kierunku w obu osiach ale przede wszystkim sygnału AUTO/Manual . Sygnał AUTO/Manual pozwala na wybór źródła sygnałów sterujących w obu osiach napędu i jednocześnie "informuje' PC ustawiając program gotopl w stanie aktywnym lub pasywnym. Dodatkowym sygnałem sterującym jest sygnał Enable/Disable. który nie ma znaczenia z punktu widzenia systemu sterowania napędem a pozwala jedynie na zmniejszenie poboru energii w trakcie przerw w obserwacji odłączając sterownik silników od zasilania.
Absolutnie minimalnym zestawem sygnałów sterujących są 2 pary (zegar i kierunek) sygnałów dla każdej z osi oraz sygnał pracy ręcznej lub automatycznej - AUTO/Manual. Z tego punktu widzenia sterownikiem może być dowolny układ rozumiejący opisany zestaw sygnałów i potrafiący go wykorzystać do poruszenia silników napędu. Z tego punktu widzenia także pilotem może być dowolne urządzenia potrafiące dostarczyć opisany zestaw sygnałów. I w końcu program gotopl działać będzie z dowolnym ukladem elektronicznym potrafiącym dostarczyć mu przez port LPT jednego sygnału sterującego AUTO/Manual (pin 15 portu LPT z poziomem 0) oraz potrafiący odebrać z tego portu 2 pary sygnałów sterujących (zegar i kierunek) z pinów 2-5 portu LPT.
Wszystkie uzywane w tym rozwiązaniu sygnały pracują w logice TTL.
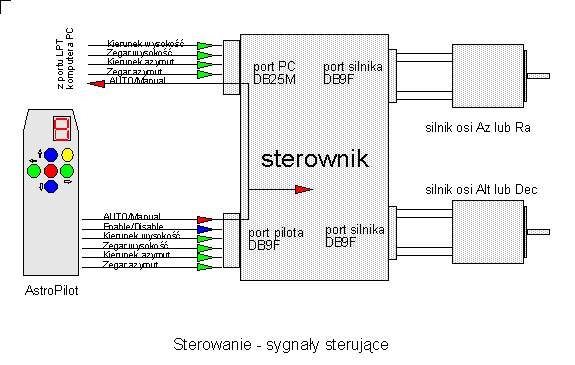
Schemat blokowy układu sterownika pozwala wyodrębnić mniejsze elementy funkcjonalne. Są to porty (złącza), którymi układ łączy się z otoczeniem, Normalizator sygnału z PC, przełacznik źródła sygnałów sterujących oraz właściwe sterowniki silników krokowych.
Rola sygnału AUTO/Manual jest decydująca dla działania systemu. W trybie Manual (ten tryb opisuje na wyświetlaczu cyfra 0 a sygnał AUTO/Manual =1) przełącznik sygnału odbiera dane sterujące z AstroPilota co pozwala na pracę w trybach ręcznych 1-5 oraz w trybach automatycznych z pilota 6-8 (śledzenie w osi Ra z prędkością sfery niebieskiej). Ten sygnał powoduje także ustawienie programu gotopl w trybie pasywnym (program nie generuje na wyjściu danych sterujących). W trybie AUTO program gotopl staje się aktywny i dostarcza na porcie LPT cztery sygnały sterujące (po dwa dla każdej osi) ściśle związane z czasem obserwacji, wybranym obiektem oraz ustawionymi w programie parametrami dotyczącymi cech fizycznych używanego montażu (rodzaj, przełożenia przekładni)
