Układ normalizatora sygnału związany jest z koniecznością dostarczenia sterownikom impulsów sterujących w odpowiedniej sekwencji. Cechą programu gotopl jest to, że sygnały sterujące generowane są w formie 'paczek' co kilkaset ms. Jest to cecha zarówno wybranego algorytmu sterowania jak i systemu Windows, który nie będąc systemem czasu rzeczywistego nie gwarantuje do końca dostarczenia sygnałów w zaplanowanej postaci.
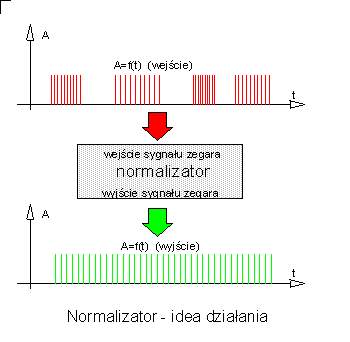
Jak pokazano na rysunku, paczki impulsów zegarowych przechodząc przez normalizator zostają zliczone i uśrednione w czasie dająć w efekcie równomierny strumień impulsów zegarowych sterujących każdą z osi. Normalizacja odbywa się dla każdej z osi oddzielnie i podlegają jej tylko sygnały zegarowe osi. Sygnały kierunku ze względu na swój charakter nie podlegają normalizacji ale stanowią istotną część algorytmu normalizacji.
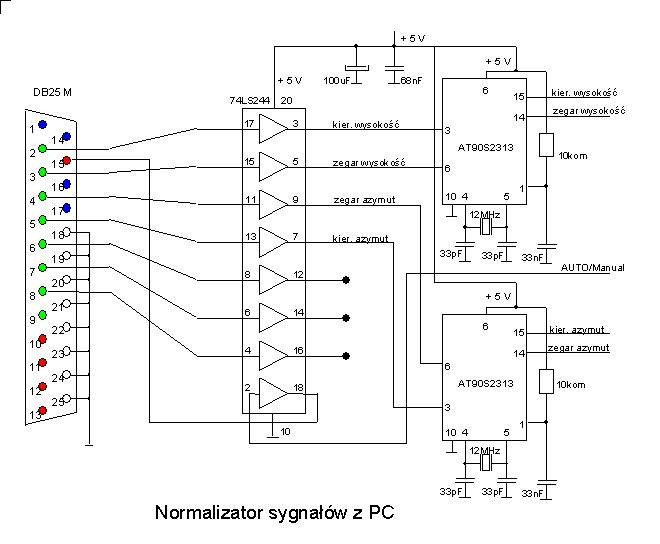
Pokazany na rysunku normalizator dołączony jest do zewnętrznego portu DB25M połączonego już bezpośrednio z portem LPT komputera PC działającego z programem gotopl. Kabel łączący normalizator (sterownik) z PC to prosty kabel 1-1 z co najmniej 6 przewodami (5 sygnałowych i 6 wspólny). Sprawdzona długość tego kabla wynosi nie mniej niż 10m choć wydaje się, że może być jeszcze dłuższa.
W zasadzie układ sterownika może nie posiadać normalizatora ale wtedy można będzie zaobserwować 'szarpaną' pracę napędu szczególnie dla dużych wartości wysokości obiektu. Efekt ten można łagodzić dobierając parametr "DELTA" na pulpicie programu gotopl, który to parametr dobiera opóźnienie pomiędzy impulsami zegarowymi dla obu osi.
Właściwa normalizacja odbywa się za pomocą programu mikrokontrolera AT90S2313, który zlicza dochodzące na jego wejście impulsy, uśrednia ich ilość w pewnym czasie po czym generuje taką samą ilość impulsów o dużej równomierności na wyjściu. Normalizacji podlegają wyłącznie sygnały zegarowe dla obu osi. Sygnały kierunku 'przechodzą' przez normalizator bez zmian.
Normalizator spełnia z programem gotopl dodatkową rolę. Buforuje sygnały sterujące (zlicza szybko docierające do niego sygnały zegarowe i przeechowuje je na tyle długo aby nie pogubiły ich silniki krokowe) pozwalając aby program gotopl szybciej wykonał swoją część związaną ze sterowaniem co w znacznym stopniu poprawia wygodę użytkownia programu.