Przełącznik sygnałów PC/AstroPilot zbudowany jest z wykorzystaniem 8 krotnego bufora 74144 (244) zblokowanego w dwie czwórki sterowane w przeciwfazie sygnałem AUTO/Manual. W ten sposób sygnał AUTO/Manual z AstroPilota decyduje czy sterowniki silników krokowych otrzymują impulsy z komputera PC (programu gotopl) czy z klawiatury AstroPilota (sterowanie ręczne).
Sterownik silnika krokowego w każdym z kanałów wykorzystuje funkcje monolitycznego sterownika IMT901 działającego w trybie mikrokroków 1/8. Dla jasności rysunku pokazany został sterownik w kanale azymutalnym. Dołączenie sterownika w kanale wysokości jest identyczne. Oba sterowniki posiadają oprócz zasilania tylko jedno wspólne połączenie: jest to sygnał Enable (pin 3 IMT901) pozwalający na ustawienie obu sterowników w stanie jałowym.
Układ sterownika silnika krokowego zasilany jest dwoma napięciami: +5V dla zgodności z układami TTL oraz napięciem 9-27V zasialjącym stopień wyjściowy mostka mocy. Poziom napięcia zasilania zależy od rezystancji użytego silnika krokowego i zalecanego prądu sterowania silnikiem. Prąd sterowania mozna obliczyć w przybliżeniu jako iloraz napięcia zasilania i sumy rezystancji silnika Rs i rezystora zabezpieczającego R czyli Imax=U/(R+Rs). Rezystor zabezpieczający R oblicza się na podstawie prądu Imax jako: R=0.8V/Imax. Dla przykladu ograczenie prądu silnika do 1A wymaga użycia rezystora R=0.8V/1A=1om.

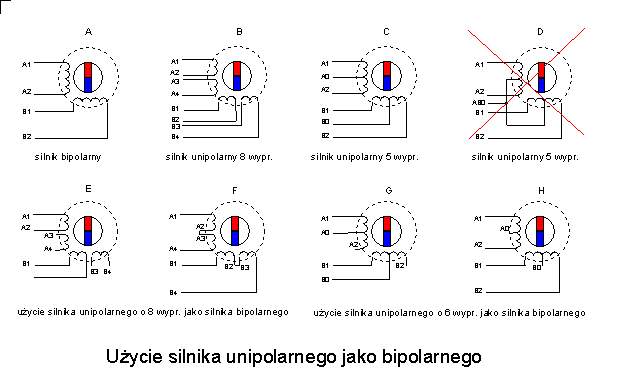
Sterownik silnika krokowego IMT901 działa wyłącznie z silnikami bipolarnymi. Ponieważ jednak silniki unipolarne wykonywane są w wielu wariantach to jest możliwe żzycie silnika unipolarnego łącznie ze sterownikiem IMT901 lub z każdym innym o podobnej konstrukcji i funkcjonalności.
Silnik bipolarny (rys A) ma tylko 2 uzwojenia. Ma strukturę symetryczną a zmianę kierunków obrotów uzyskuje się przez prostą zamianę miejsc podłączenia końcówek dowolnego z uzwojeń. Najczęściej spotykane silniki unipolarne mają 8 (rys. B), 6 (rys. C) lub 5 wyprowadzeń (rys. D). Silnika typu D nie można wykorzystać jak silnika bipolarnego ze względu na niemośliwość rozdzielenia uzwojeń A i B. Na rysunkach E - H pokazano jak można wykorzystać silniki krokowe unipolarne o konstrukcji B i C w pracy jako silniki bipolarne. Przypadki E i G to wykorzystanie połowy uzwojeń a przypadki F i H polegają na wykorzystaniu całych uzwojeń tych silników. Należy pamiętać, że silniki wykorzystujące całe uzwojenia mają dwukrotnie większe oporności uzwojeń i będą wymagać w przybliżeniu dwukrotnie większego napięcia zasilania.