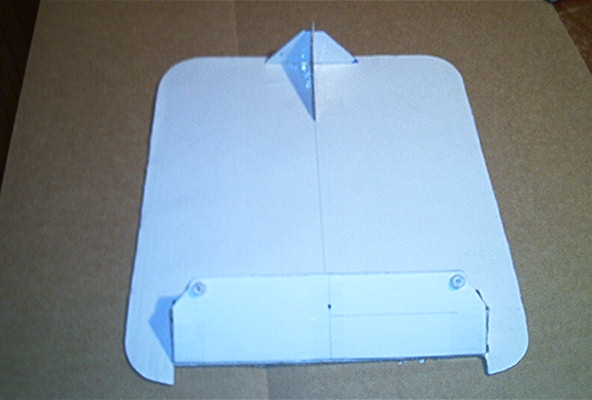
W celu przetestowania wybranej koncepcji oraz sprawdzenia założeń wykonałem z tektury model w skali 1:3. Rzeczywiste wymiary platformy wyniosą ok. 600/700mm oraz ok. 140mm wysokości (nie licząc regulowanych nóg).

Tu platforma w drugim skrajnym położeniu. Kąt obrotu platformy wynosi ok. 17 stopni czyli nieco więcej niz godzina obserwacji.

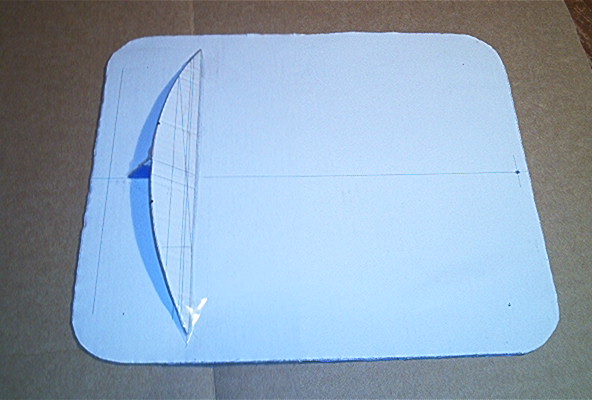
Podstawa platformy zawiera łożyskowanie części południowej i północnej. Część południowa łożyskowana jest w jednym punkcie co pozwoli na uproszczenie tej części urządzenia.


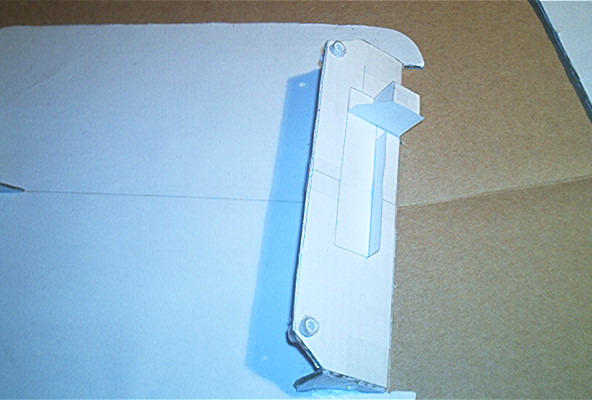
Jako napęd zastosowany zostanie sprawdzony już system napędowy w postaci AstroPilota, napędu śrubowego oraz zespołu napędowego opisanego w konstrukcji napędu teleskopu Synta. Na zdjęciu pokazane zostało położenie systemu napędowego na wsporniku łożyskującym północny okrąg wirtualny. W modelu nie pokazany został właściwy wycinek koła wirtualnego, na którym rozpięta zostanie śruba napędowa. Można jednak oszacować rozmiary tego koła na ok. 900mm średnicy co daje obwód około 2827mm. Na wycinku tego koła umieszczony będzie pręt gwintowany M8 (skok 1.25mm) a więc przekładnia mechaniczna na śrubie wyniesie ok.2262 razy. Poniaważ silnik napędza śrubę przez przekładnię paskową o przełożeniu 1:2 wypadkowa przekładnia mechaniczna wyniesie 4524 razy. W połączeniu z silnikiem krokowym o 200 krokach sterowanym półkrokowo uzyska się wypadkowe przełożenia równe ok. 1809600 razy co da krok sterowania ok. 0.72 sek łuku (ok. 21 Hz sygnał sterujący). Stosując sterownik mikrokrokowy z podziałem na 10 nastąpi poprawa dokładności sterowania jeszcze pięciokrotnie do poziomu 0.14 sek. łuku na 1 krok (ok. 105 Hz sygnał sterujący)
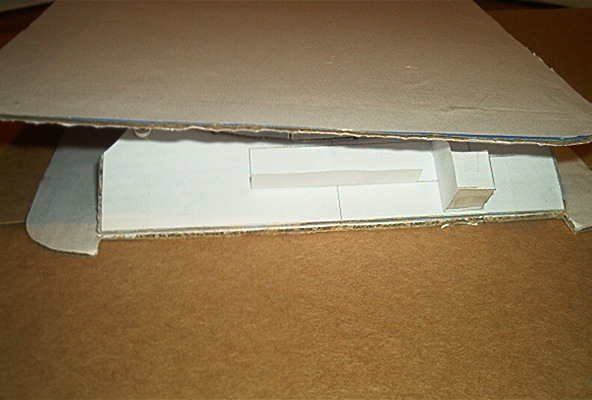
Wymiary elementów i odległości zostały tak dobrane, że system napędowy w całości mieści się 'wewnątrz' platformy.