Procesor sygnału - v.5.x
Obudowa, gniazda i regulatory
Główne zmiany jakie zaszły w procesorze sygnału (PS) w ostatnim czasie dotyczą układu elektronicznego ale przede wszystkim oprogramowania sterującego systemem.
Układ w dalszym ciągu ma 5 klawiszy o kontekstowym przeznaczeniu (zależnym od miejsca działania programu) ma dwa gniazda do połączeń zewnętrznych typu RJ45: jedno do połączenia ze sterownikem silników krokowych a drugie wykorzystywane w podwójnej roli raz do połączenia z PC w celach konfiguracyjnych ale również do pracy w systemie guide. Dodatkowym elementem jest regulator podświetlenia wyświetlacza umożliwiający dopasowanie urządzenia do warunków nocnych obserwacji.
W obudowie znajduje się wieszak wykonany z elastycznego sznurka umożliwiający powieszenie urządzenia na teleskopie lub montażu, nowa atrapa jest teraz całkowicie wykonana z plastyku co zapewnia, że jest w pełni odporna na wodę.

Hardware
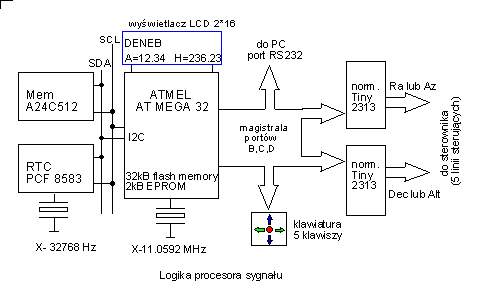
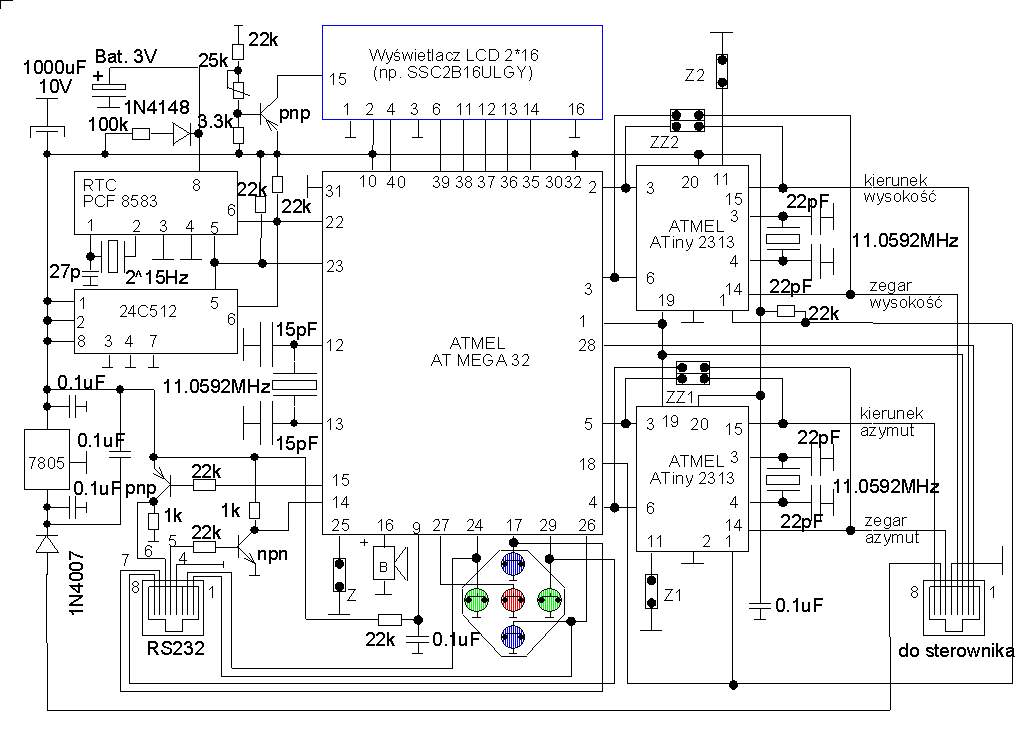
W aktualnej wersji procesora sygnału na płycie drukowanej znajdują się dodatkowe uklady scalone normalizatorów oraz dodatkowe pamięć 512kb. Komunikacja z pamięcią A24C512 odbywa się, podobnie jak z zegarem RTC za pomocą magistrali SDA/SCL. Dodatkowa pamięć pozwalająca na zapamiętanie prawie 3600 obiektów zwolniła miejsce dla programu podstawowego umożliwiając wprowadzenie modułu do połączenia z PC, wprowadzenie modułu planetarnego wbudowanie funkcji guide i wprowadzenie kilkunastu drobniejszych poprawek i udogodnień.
Port komunikacyjny RS232 (RJ45) do połączenia z komputerem PC wykorzystany jest podwójnie. Ponieważ do komunikacji szeregowej niezbędne są dwa sygnały oraz masa do dyspozycji jest 5 styków z czego wykorzystane zostały 4 styki do realizacji funkcji guide. Ze względu na rozłączny charakter zadań realizowanych przy połączeniu z PC oraz przy działaniu funkcji guide nie ma konfliktu związanego z podwójnym wykorzystaniem portu.
Regulację podświetlenia wyświetlacza umożliwia miniaturowy potencjometr umieszczony powyżej wyświetlacza.
Układ scalony zegara RTC został przeniesiony pod wyświetlacz w w powstałe miejsce wprowadziłem układ scalony pamięci 512kb.
Działające na wyjściu procesora sygnału układy scalone normalizatorów mają zwory konfiguracyjne umożliwiające dopasowanie algorytmu normalizacji do dwóch najbardziej typowych silników krokowych 1.8 i 7.5 stopnia.
Płytka przycisków jest oddzielnym elementem wlutowywanym na stałe w ostatniej kolejności po sprawdzeniu, że wszystkie zakrywane elementy zostały wlutowane poprawnie. Położenie płytki przycisków względem głównej płytki drukowanej określają jednoznacznie miejsca wlutowania przewodów łączących a odległość wzajemna obu płytek powinna wynosić 3.5-4.5mm.
Zamiast pokazanego na zdjęciach wyświetlacza LCD SSC2B16ULGY mozna zastosować po pewnej adaptacji OM16226 (Ocular) lub PC1602V (Powertrip)


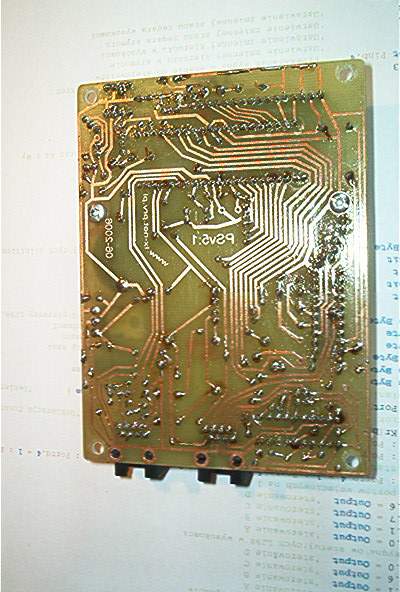
Płytka drukowana nieco się skomplikowała i choć zwiększyła się ilość zwor po stronie elementów to udało się zachować cały układ w technologi jednowarstwowej utrzymując koszty na niskim poziomie z możliwością wykonania płytki w warunkach domowych np. metodą termotransferu.
Funkcjonalność
W algorytm procesora sygnału wprowadzony został moduł do połączenia z komputerem PC dla celów konfiguracyjnych. Wejście do modułu komunikacji z PC możliwe jest podczas procedury startowej procesora gdy po początkowej inicjalizacji system wyświetla przez 5 sekund zaproszenie do wejścia do tego modułu prezez uzycie klawisza środkowego (czerwonego). Jeśli w tym czasie klawisz środkowy nie zostanie naciśnięty i przytrzymany wtedy system przechodzi do wyliczenia współrzędnych Słońca, Księżyca i planet i kończy setup wyświetleniem głównego menu programu.
Wejście do procedury komunikacji z PC przez użycie środkowego klawisza sygnalizowane jest specjalnym sygnałem dźwiękowym oznaczającym przekazanie sterowania do komputera PC. Od tej pory wszystkie operacje związane z konfiguracją i działaniem na bazach danych procesora możliwe są wyłącznie w programie na PC a dokonane zmiany zaczną obowiązywać po wpisaniu ich do procesora sygnału z poziomu programu oraz po restarcie urządzenia.
Program konfiguracyjny do obsługi procesora sygnału zawiera dwie sekcje. Jedna z nich to sekcja konfiguracyjna umożliwiająca zmianę parametrów procesora sygnału związanych z czasem i miejscem obserwacji a także z typem i parametrami technicznymi współpracującego montażu i jego silników krokowych. Druga sekcja programu pozwala na manipulację bazami danych zapisanych w dodatkowej pamięci procesora sygnału. Obecnie syatem posiada cztery bazy oznaczone: S - Słońce, Księżyc, planety i gwiazdy (do 200 obiektów), M- wszystkie obiektu Messier (110 obiektów), N-obiekty NGC/IC (do 2000 obiektów) oraz O-obiekty własne (do 1297 obiektów). W sumie możliwe jest obecnie zapisanie łączne prawie 3600 obiektów
Aby pobrać program do połączenia z PC kliknij na poniższy link
Dokumentacja
Budowa PS nie jest skomplikowana pod warunkiem użycia właściwych elementów zapewniających realizację założeń projektowych. Chodzi głównie o zgodność mechaniczną co pozwoli na prawidłowe zamknięcie urządzenia w obudowie. Prawidłowo zmontowany układ nie wymaga żadnej regulacji i startuje bez problemu. Większość podstawowych dysfunkcji urządzenia można diagnozować za pomocą miernika uniwersalnego.
Elementy można zakupić samemu lub skorzystać z gotowego 'kit-a'. Tym, którzy mają już mikrokontrolery gwarantuję bezpłatne zaprogramowania wersją optogramowania v4.5. Wersja 5.xx zawierająca funkcję guide wymaga dodatkowej opłaty.
Aby zobaczyć schemat PS kliknij na poniższy link
Aby pobrać schemat PS kliknij na poniższy link
Aby pobrać dokumentację konstrukcyjną PS kliknij na poniższy link
Aby pobrać wykaz elementów z orientacyjnymi cenami kliknij na poniższy link
zestawienie materiałów z cenami
Oprogramowanie
Procesor sygnału raportuje podczas startu aktualnie działającą wersję oprogramowania. Istnieją 4 wersje tego oprogramowania:
v2.xx - ta wersja jest najstarszą działającą wersją z bazą danych ograniczoną do ok. 800 obiektów, bez dodatkowej pamięci, bez modułu planetarnego i funkcji guide. Ta wersja oprogramowania zawiera również błąd w algorytmie sterowania dla montażu paralaktycznego (Ra/Dec), który ujawnia się podczas prowadzenia obiektu w pobliżu lokalnego południka (przy zmianie na wyświetlaczu azymutu ze 179.99 na 180 stopni). Błąd ten powoduje, że montaż śledząc obiekt przekraczający południk lokalny wpada w pułapkę dzielenia przez zero i wykonuje nieskończony skok goto w osi Ra. Błąd ten nie ujawnia się podczas skoków goto.
v3.5 - wersja ta ma podstawowe cechy jak wersja v2.xx ale poprawiony w niej został również błąd przejścia obiektu przez południk miejscowy. Doadtkowo w tej wersji skorygowana została procedura setup ze względu na aktualizację czasu zegara RTC.
v4.5 - jest to wersja obsługująca dodatkową pamięć dla prawie 3600 obiektów, zawierająca również moduł planetarny a także możliwość konfigurowania i zmiany baz obiektów przez program działający na komputerze PC. Wersja ta zawiera szereg drobniejszych poprawek i udogodnień ułatwiających obsługę.
v5.xx - jest to najbardziej zaawansowana wersja oprogramowania zawierająca pełną funkcjonalność wersji 4.5 oraz dodatkowo wbudowaną funkcję guide do współpracy z programem GuideDog.