Zrób Sam - Wstęp
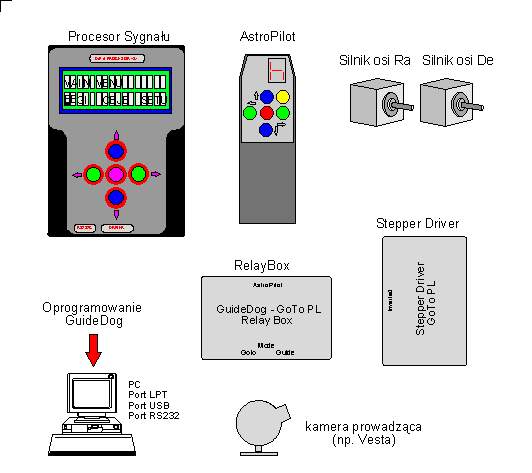
Składniki systemu
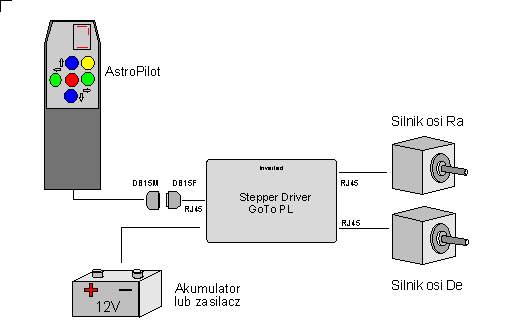
W skład systemu wchodzą: sterownik silników krokowych (Stepper Driver), AstroPilot, Procesor Sygnału goto, RelayBox do pracy guide a także nie pokazane tu przewody połączeniowe oraz drobniejsze podzespoły elektroniczne
Elementy pokazane na rysunku można wykorzystać do budowy systemu sterowania teleskopu lub platformy paralaktycznej od najprostszego sterowania w jednej osi do pełnego systemu goto wraz ze śledzeniem guide niezbędnym w astrofotografii.
W następnych częściach opisu pokazane zostaną podstawowe konfiguracje jakie można złożyć z pokazanych składników. Każdy z elementów zostanie opisany w możliwie dokładny sposób pozwalający na własnoręczne wykonanie modułu. Oprócz opisu technicznego czytelnik znajdzie także oszacowanie kosztów wykonania urządzenia w formie zestawienia w pliku excell-a. Koszt zakupu gotowego urządzenia jest dwukrotnie większy niż koszt elementów do jego wykonania.
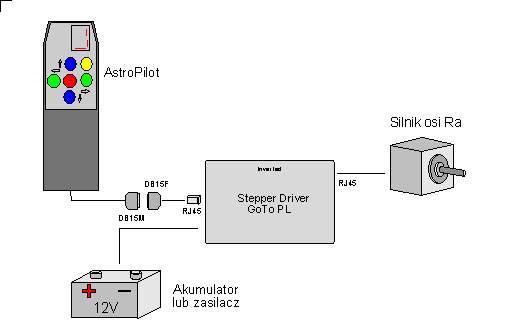
Sterowanie zegarowe w jednej osi
Sterowanie w jednej osi pozwala na śledzenie obiektów nieba za pomocą montażu paralaktycznego mającego napęd co najmniej w osi Ra (montaże EQ/CG co najmniej 2, Soligor, SVP i podobne) realizowany za pomocą silnika krokowego bi lub unipolarnego o oporności uzwojenia większej niż 15 omów. W opisie sterownika można znależć również dokumentację niezbędną do wykonania wszystkich przewodów połączeniowych. Użycie AstroPilota pozwala na kilka prękości ręcznych w zakresie prędkości 1-100, 3 tryby śledzenia (słoneczny, lunarny i gwiazdowy), korektę ręczną w osi Ra w trybach śledzenia oraz na programowalne dopasowanie parametrów sterowania do każdego montazu (każdej przekładni).
Przejdź do dokumentacji sterownika silników krokowych (Stepper Driver)
Sterowanie zegarowe w dwóch osiach
Bardziej zaawansowana wersja sterowania montażu paralaktycznego umożliwia sterowanie zarówno w osi Ra jak i w osi Dec. Oczywiście montaż musi mieć napęd na obie osie realizowany za pomocą silników krokowych uni lub bipolarnych (montaże EQ/CG co najmniej 2, Soligor, SVP i podobne). Cechy tego sterowania są identyczne jak dla sterowania w jednej osi ale dodatkowo można również sterować teleskopem w drugiej osi co ma znaczenie dla ręcznej korekcji prowadzenia podczas wykonywanie zdjęć.
Przejdź do dokumentacji sterownika silników krokowych (Stepper Driver)
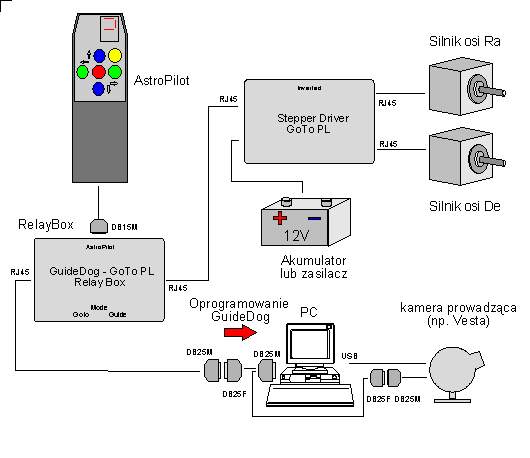
Sterowanie zegarowe w dwóch osiach z prowadzeniem guide
Już system 'zegarowy' ze śledzeniem w jednej osi i napędem w osi Dec pozwala na realizację systemu guide. Do tego niezbędny jest układ RelayBox potrafiący zamienić sygnały sterujące z programu śledzenia (ja korzystam z możliwości programu GuideDog) na sygnały zrozumiałe dla sterownika silników krokowych i działające w taki sposób, że błąd prowadzenia dla każdej osi jest minimalizowany w każdym kroku śledzenia.
Warunkiem koniecznym do realizacji systemu jest oczywiście komputer PC z zainstalowanym oprogramowaniem guide (GuideDog), kamera typu Vesta (najlepiej modyfikowana na długie czasy) oraz system połączeń kablowych.
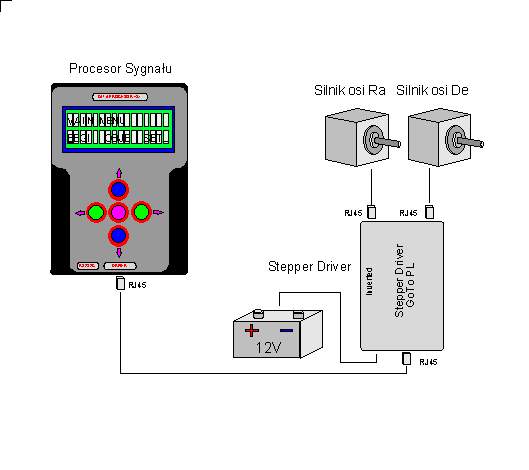
System goto
Działanie systemu goto, w szczególności dla montażu Az/Alt (np. dobsona) nie może polegać na sterowaniu zegarowym bo dane muszą być przeliczane na bieżąco zarówno podczas prowadzenia ale szczególnie w czasie skoku goto. Rolę inteligentnego przelicznika współrzędnych, na podstawie, których dokonywane są decyzje dotyczące ruchu silników pełni procesor sygnału. Połączenie procesora sygnału ze sterownikiem wykonane jest za pomocą prostego kabla RJ45/RJ45 (połączenia pinów to 1-1, 2-2, .....8-8).
Sterownik został opisany wcześniej natomiast najbardziej aktualny opis procesora sygnału znajduje się w oddzielnym wątku gdzie wyliczone zostały parametry procesora oraz jego konstrukcja oraz sposób obsługi. Najbardziej aktualne dane dotyczące użycia procesora sygnału znaleźć można także na forum www.astromaniak.pl w recenzji Grzegorza Skowrońskiego.
System goto z prowadzeniem guide
Najbardziej zaawansowana konfiguracja systemowa to użycie procesora sygnału w systemie o funkcjonalności guide.
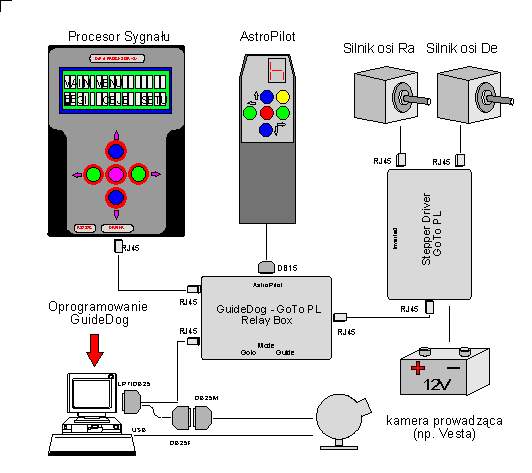
Pierwszy z rysunków pokazuje jak procesor sygnału może współdziałać z opisanym wcześniej systemem guide. Dodatkowym elementem jest dołączony procesor sygnału (za pomocą prostego kabla RJ45/RJ45). Najbardziej efektywny sposób posługiwania się zestawem polega na użyciu procesora sygnału do prowadzenia i wyszukiwania obiektów (przełącznik Mode w RelayBox-ie w położeniu Goto) i przejściu na pracę guide (przełącznik Mode w położeniu Guide) po wyszukaniu żądanego obiektu oraz wyborze gwiazdy prowadzącej. Podczas pracy guide sterowanie zapewnia AstroPilot oraz oprogramowanie GuideDog ale równolegle działa dla wybranego obiektu także procesor sygnału więc przełączenie przełącznika Mode w pozycję Goto przekazuje kontrolę z powrotem do procesora sygnału. W obu położeniach przełącznika Mode możliwe są wszystkie funkcje AstroPilota (położenie Guide) lub procesora sygnału (położenie Goto) a więc także ręczna korekta położenia za pomocą klawiszy kierunkowych. W pokazanej konfiguracji sprzętowej nie wykorzystuje się wbudowanej do procesora sygnału funkcjonalności guide, którą realizuje AstroPilot i RelayBox pod kontrolą oprogramowania GuideDog.
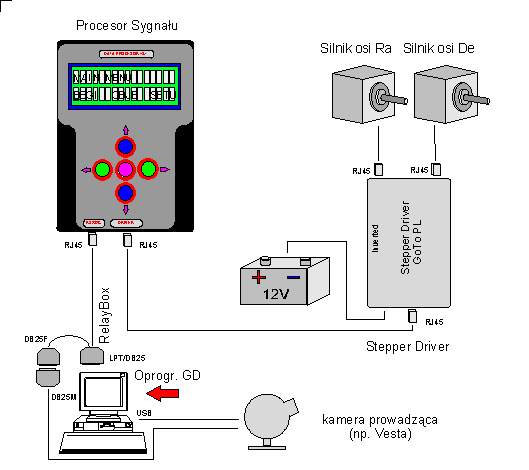
Drugi z rysunków pokazuje w jaki sposób można wykorzystać wbudowaną do procesora sygnału funkcjonalność guide. Układ połączeń jest w tej konfiguracji zredukowany do niezbędnego minimum. Sterowanie z programu GuideDog wprowadzone jest do procesora sygnału poprzez gniazdo używane również do połączenia konfiguracyjnego procesora sygnału (za pomocą dodatkowego oprogramowania.). Przeniesienie części funkcji guide do procesora sygnału pozwoliło na redukcję RelayBox-a do minimalnej formy polegającej wyłącznie na separacji sygnałów za pomocą optoizolatorów.
W obu pokazanych konfiguracjach sprzętowych występuje kabel RelayBox mający od strony PC dodatkowe wyprowadzenie na gnieździe DB25F sygnałów D0-D3 z portu LPT, które mogą być wykorzystane np. do sterowania funkcą LX kamery prowadzącej guide lub do sterowania migawką aparatu Canon (z dodatkowym kablem przejściowym).
Skuteczność działania funkcji guide wbudowanej do procesora sygnału można ocenić po analizie logów prowadzenia oraz wykresu zbudowanego na podstawie tych danych. Analizowane dane dotyczą sesji trwającej 6667 sekund podczas naświetlania przez Grzegorza mgławicy M27 17.08.2006r.